

|
2697| 0
|
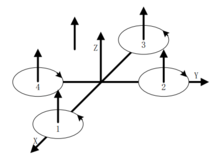
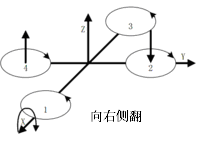
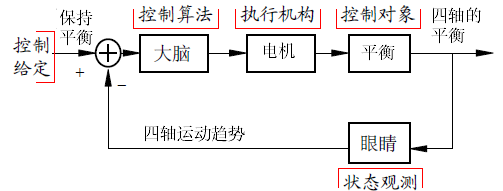
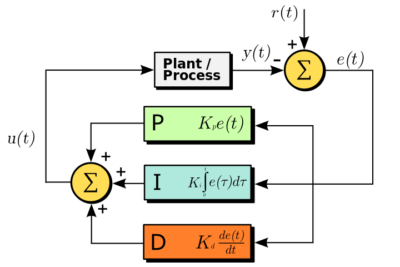
四轴飞行器:PID控制算法 |
| ||
相关帖子 |
||


 发表于 2014-12-11 23:19:06
发表于 2014-12-11 23:19:06

关闭
站长推荐


- 【预约|参会享"豪"礼】2025慕尼黑上海设备展
- “2025慕尼黑上海电子生产设备展”将于2025年03月26-28日上海新国际博览中心开幕诚邀您的光临!
ICP经营许可证 苏B2-20140176 苏ICP备14012660号-2 苏州灵动帧格网络科技有限公司 版权所有.

Powered by Discuz! X3.4
Copyright © 2001-2024, Tencent Cloud.