TA的每日心情 | 慵懒
2016-10-17 12:07 |
|---|
签到天数: 306 天 连续签到: 1 天 [LV.8]以坛为家I
|
通过串口控制LED1状态
串口输入 ON LED1 点亮
串口输入 OFF LED1 熄灭
串口输入 其它 报错
1、驱动
串口驱动程序官方已经给出
代码路径:/kernel_smdkv210/drivers/serial/samsung.c
2、硬件
SIN210用户IO 扩展口,有1 路SPI 总线,1 路IIC 总线,两个五线串口,一个三线串口,1 路AD 输入,1 个PWM ,1 个中断,5V 电源和GND 方便用户各种应用扩展。
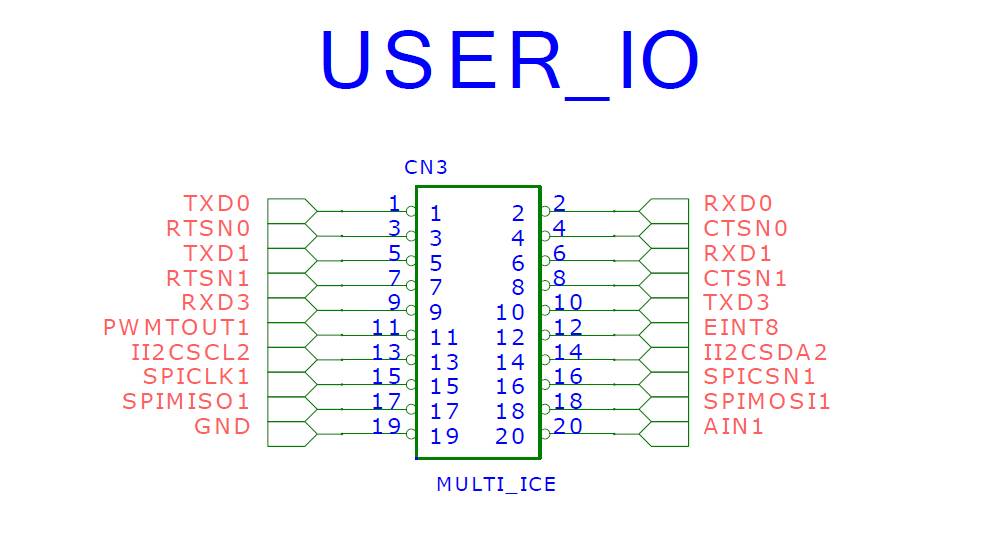
图19-1: User IO 原理图
开发板上USER_IO 带白色三角形标记的就是对应的 上图的一号引脚。
开发板中的com口连接的是TXD2和RXD3 用于系统调试,所以UserIO中没有这两个引脚,如下所以:
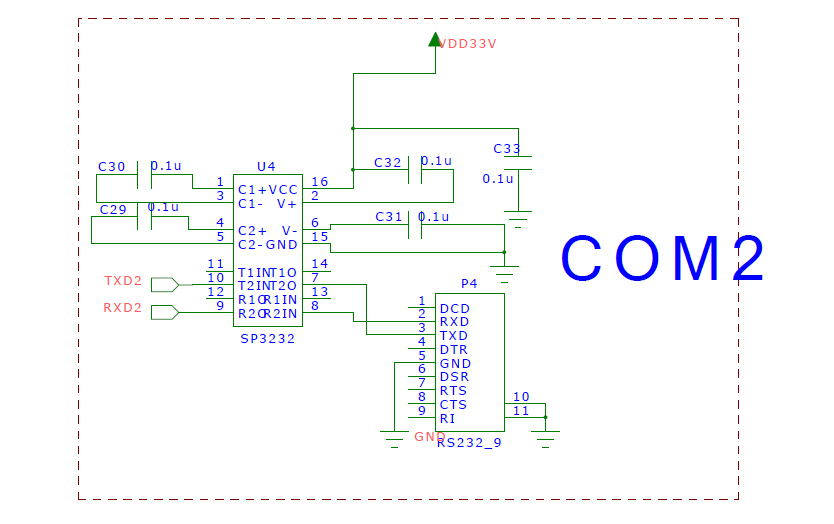
图19-2: COM 2 电路
笔者采用的是通过TXD0和RXD0来控制LED,用到了一个USB转TTL的电平转换模块:
将USB装TTL的 TXD、RXD、GND和开发板的TXD0、RXD0、GND相连接,如此硬件编连接好了。
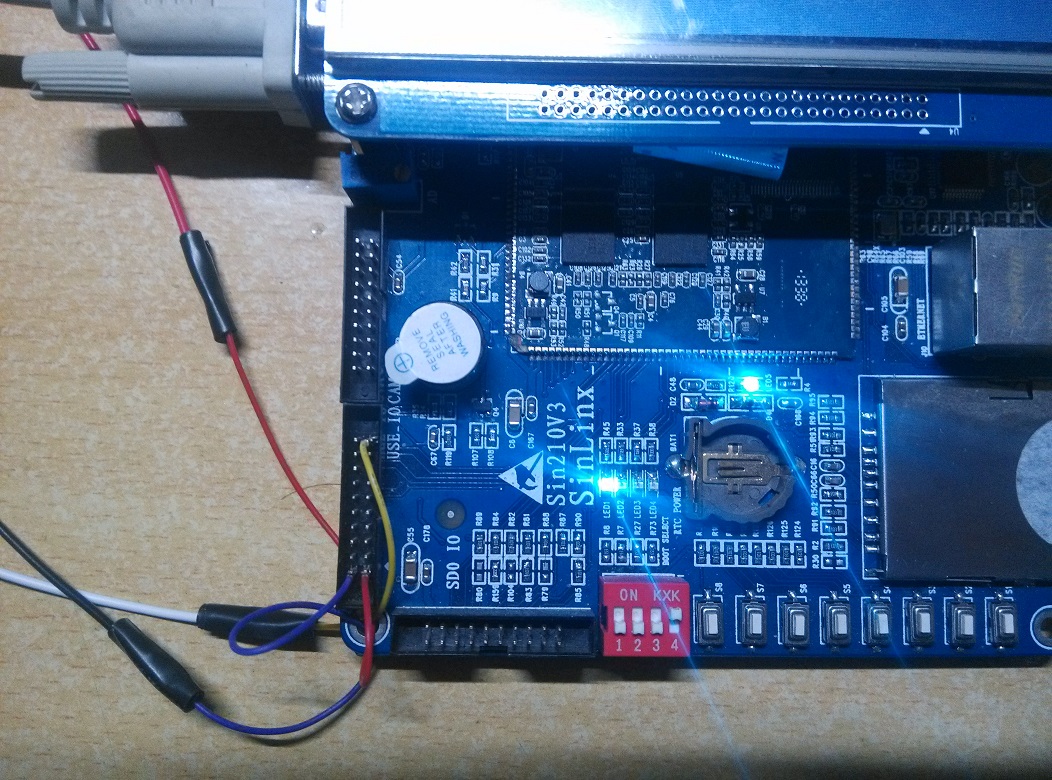
图19-3-0: 连接
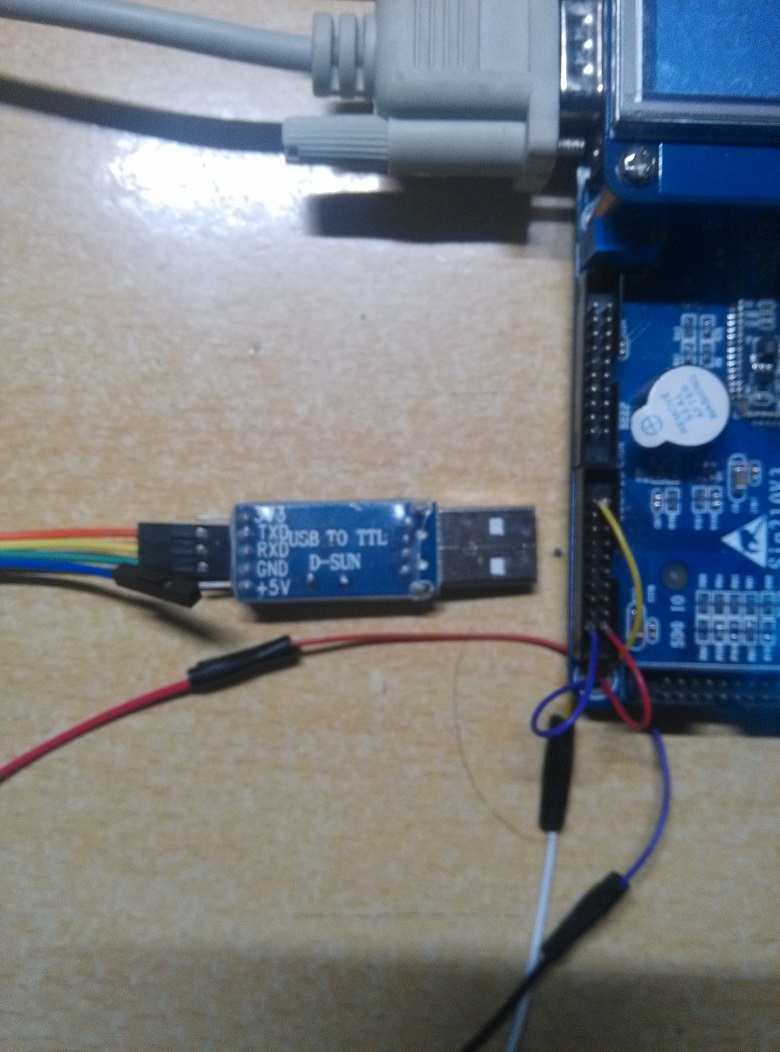
图19-3-1: 连接
3、应用
下面就是要编写应用程序了,结合以前的文章LED,串口配置校验位什么的,就不解释怎么用了,单片机里都有学过的,废话不说了,直接贴代码:
/**** USART0_LED.c ****/ #include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <termios.h> #include <errno.h> #include <sys/time.h> #define LED1 0 #define LED2 1 #define LED3 2 #define LED4 3 #define LED_ON 0 #define LED_OFF 1 #define TRUE 1 #define FALSE -1 int speed_arr[] = {B115200, B38400, B19200, B9600, B4800, B2400, B1200, B300, B38400, B19200, B9600, B4800, B2400, B1200, B300, }; int name_arr[] = {115200, 38400, 19200, 9600, 4800, 2400, 1200, 300, 38400, 19200, 9600, 4800, 2400, 1200, 300, }; void set_speed(int fd, int speed) { int i; int status; struct termios Opt; tcgetattr(fd, &Opt); for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++) { if (speed == name_arr) { tcflush(fd, TCIOFLUSH); cfsetispeed(&Opt, speed_arr); cfsetospeed(&Opt, speed_arr); status = tcsetattr(fd, TCSANOW, &Opt); if (status != 0) perror("tcsetattr fd1"); return; } tcflush(fd,TCIOFLUSH); } } int set_Parity(int fd,int databits,int stopbits,int parity) { struct termios options; if ( tcgetattr( fd,&options) != 0) { perror("SetupSerial 1"); return(FALSE); } options.c_cflag &= ~CSIZE; switch (databits) { case 7: options.c_cflag |= CS7; break; case 8: options.c_cflag |= CS8; break; default: fprintf(stderr,"Unsupported data size\n"); return (FALSE); } switch (parity) { case 'n': case 'N': options.c_cflag &= ~PARENB; /* Clear parity enable */ options.c_iflag &= ~INPCK; /* Enable parity checking */ options.c_iflag &= ~(ICRNL|IGNCR); options.c_lflag &= ~(ICANON ); break; case 'o': case 'O': options.c_cflag |= (PARODD | PARENB); options.c_iflag |= INPCK; /* Disnable parity checking */ break; case 'e': case 'E': options.c_cflag |= PARENB; /* Enable parity */ options.c_cflag &= ~PARODD; options.c_iflag |= INPCK; /* Disnable parity checking */ break; case 'S': case 's': /*as no parity*/ options.c_cflag &= ~PARENB; options.c_cflag &= ~CSTOPB; break; default: fprintf(stderr,"Unsupported parity\n"); return (FALSE); } switch (stopbits) { case 1: options.c_cflag &= ~CSTOPB; break; case 2: options.c_cflag |= CSTOPB; break; default: fprintf(stderr,"Unsupported stop bits\n"); return (FALSE); } /* Set input parity option */ if (parity != 'n') options.c_iflag |= INPCK; options.c_cc[VTIME] = 150; // 15 seconds options.c_cc[VMIN] = 0; tcflush(fd,TCIFLUSH); /* Update the options and do it NOW */ if (tcsetattr(fd,TCSANOW,&options) != 0) { perror("SetupSerial 3"); return (FALSE); } return (TRUE); } int OpenDev(char *Dev) { int fd = open( Dev, O_RDWR ); //| O_NOCTTY | O_NDELAY if (-1 == fd) { perror("Can't Open Serial Port"); return -1; } else return fd; } int main(int argc, char **argv) { int fd; int nread; char buffer[512]; char *dev ="/dev/ttySAC0"; int n=0,i=0; int fdled = -1; fdled = open("/dev/led",O_RDWR); if(fdled<0) { printf("Error:Can't open /dev/leds\n"); return -1; } ioctl(fdled, LED_OFF, LED1); ioctl(fdled, LED_OFF, LED2); ioctl(fdled, LED_OFF, LED3); ioctl(fdled, LED_OFF, LED4); fd = OpenDev(dev); if (fd>0) set_speed(fd,115200); else { printf("Can't Open Serial Port!\n"); exit(0); } if (set_Parity(fd,8,1,'N')== FALSE) { printf("Set Parity Error\n"); exit(1); } printf("\nWelcome to TTYtest\nHelloWii\n"); write(fd,"helloworld\n!!!!\n",12); while(1) { nread = read(fd,&buffer[n],1); n++; if (buffer[n-1] == '\r') { printf("\n-------------\n"); if((buffer[0]=='O')&&(buffer[1]=='N')) { write(fd, "\nLED 1 is Open\n", 15); printf("LED 1 Is Open"); ioctl(fdled, LED_ON, LED1); } else if((buffer[0]=='O')&&(buffer[1]=='F')&&(buffer[2]=='F')) { write(fd, "\nLED 1 is Close\n", 16); printf("LED 1 Is Close"); ioctl(fdled, LED_OFF, LED1); } else { write(fd, "\nWRONG INFORMATION\n\n", 21); printf("WRONG INFORMATION\n"); } printf("\n*************\n\n");n=0; } } } view plaincopy to clipboardprint?<pre name="code" class="c"># General Makefile Exec := USART0_LED Obj := USART0_LED.c CC := arm-linux-gcc $(Exec) : $(Obj) $(CC) -o $@ $(Obj) $(LDLIBS$(LDLIBS-$(@))) clean: rm -vf $(Exec) *.elf *.o <span style="font-family:'sans serif', tahoma, verdana, helvetica;line-height:1.5;"></span> 4、运行
编辑生成可执行文件,到开发板上,运行,我在Ubuntu系统中使用的minicom,配置好波特率即可
(注:下图左侧是 com2调试串口,有测试USART0控制串口)
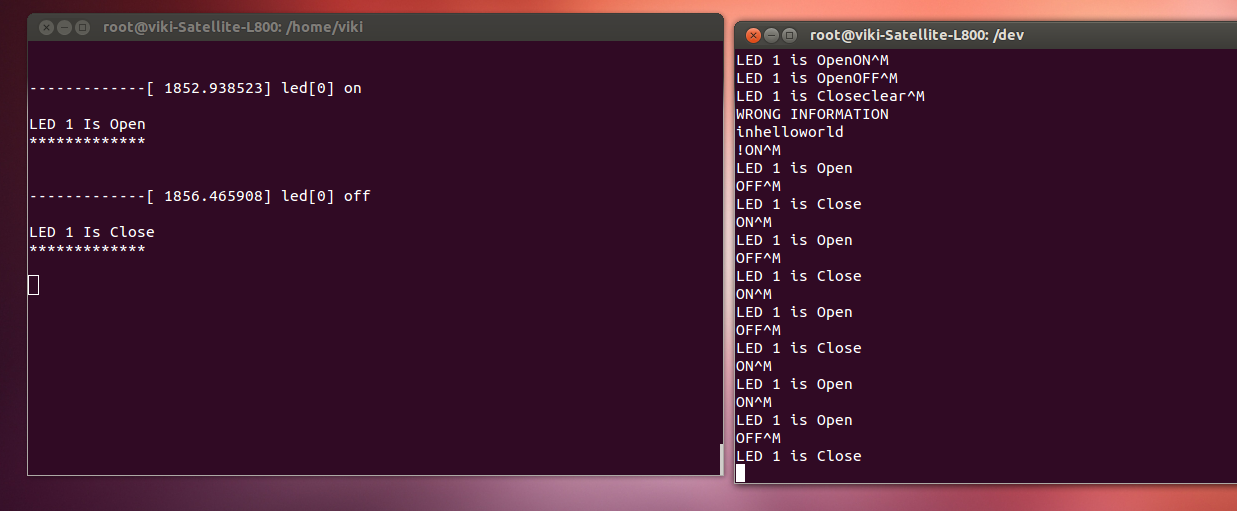
图19-4: 串口效果
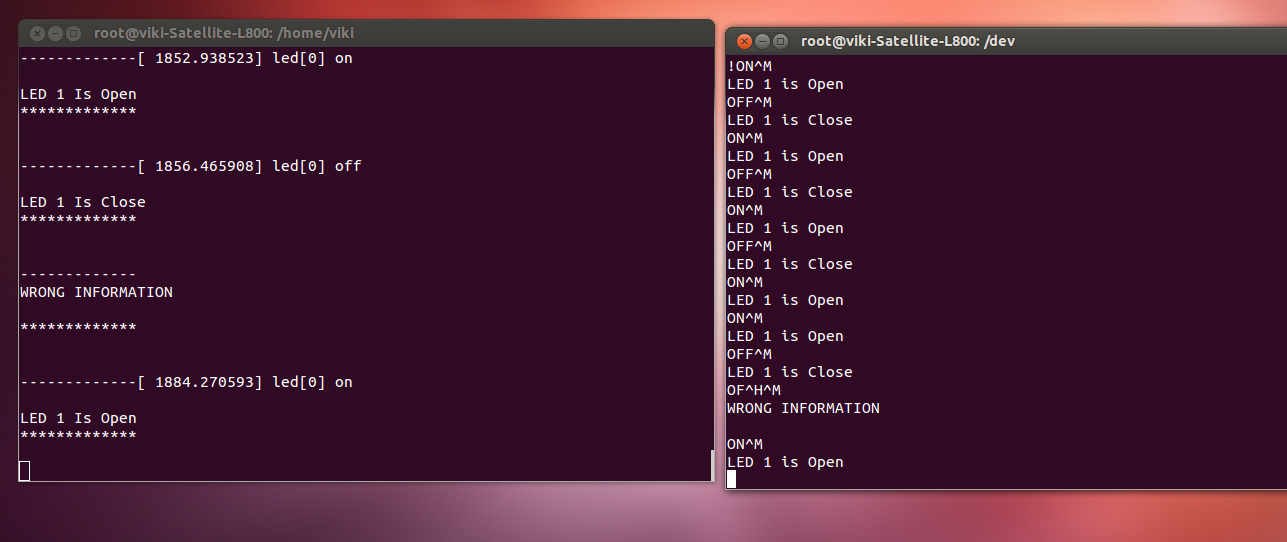
图19-5: 串口效果 |
|


 发表于 2015-3-23 09:58:35
发表于 2015-3-23 09:58:35
 /4
/4 
