


 9976
9976
人类正常的工作与生活离不开双手的活动。在人与环境交互的需求中,手占据极其重要的地位。人的上肢功能占全身功能的60%,手指功能占上肢功能的90%。人形机器人可以更加方便地使用为人设计的各种工具和仪器,一个主要原因就是灵巧手与人手有着相似的形态、结构和功能,能够完成灵活精细的抓取操作。如果没有灵巧手,那么人形机器人几乎没有用,因为它没有执行主要功能的设备以达到特定目的。本文主旨在于拆解和分析人形机器人灵巧手的结构,以及国内主要空心杯和灵巧手相关企业的介绍分析,以供大家参考。
一、灵巧手简介
1.1、人手基本功能
人手的运动涉及相当高的灵活性水平,能做出各种各样的动作,适用于执行各种需要抓握力的任务。人手有十三种基本功能,其中抓取操作有勾拉、侧捏、动态操作、球形抓握、球形指尖握、柱状抓握、二指尖捏和多指尖捏八种。

图|人手的基本功能
来源:华安证券
1.2、人形机器人灵巧手
特斯拉Optimus 和优必选Walker的灵巧手都是电机驱动,特斯拉灵巧手为减小电机尺寸而使用空心杯电机。从基本参数看,Optimus单手拥有6个执行器,11个自由度,可抓起20磅重量。利用仿生学关节设计,在灵巧手结构上,特斯拉采用弹簧负载设计方案。从内部构成看,每个执行器由空心杯电机+螺纹丝杠+精密行星齿轮箱+编码器构成。灵巧手采用金属肌腱,能够带动机器人精确抓住小而薄的物体。

图|Optimus单手6个执行器、11个自由度,可抓起20磅重量
来源:特斯拉发布会
1.3、灵巧手结构

图|人形机器人灵巧手实物拆解图
来源:与非研究院

图|手指结构拆解

图|空心杯电机+行星减速器拆解图
来源:与非研究院
由图,空心杯电机和行星减速器为手指驱动的关键。手指的驱动来自空心杯电机的转动,带动行星减速器施加反向作用力,通过铰链等连接拉动手指关节,实现旋转运动到线性运动的转换。通过施加正向或反向的电压,手指可以实现伸缩动作,进而握紧或者松开物体。
二、国内空心杯电机企业分析
2.1、鸣志电器
2.1.1、空心杯电机简介
空心杯电机分为有刷和无刷两种,有刷电机转子无铁芯,无刷电机(又称无刷无齿槽电机)定子无铁芯。可以看出两种电机的区别在于有刷空心杯电机利用碳刷(或者金属电刷)和换向器的配合来完成换向,无刷空心杯电机没有这种物理结构,线圈导线直接连接到控制器,通过处理连接板上的霍尔反馈的位置信号完成换向;有刷空心杯电机是线圈,换向器和连接板在外壳和永磁体中间旋转,他们共同组成转子。无刷空心杯的线圈是固定的,永磁铁作为转子在中间旋转。
来源:鸣志电器官网
公司目前开发出了φ13mm、φ16mm、φ22mm机座尺寸的无刷空心杯电机,电机的空载转速可以达到15000rpm~50000rpm。根据客户需求提供齿轮箱、编码器、高低速应用、高低温环境等定制选项。

来源:鸣志电器官网
在有刷空心杯产品领域,公司开发了φ8mm、φ10mm、φ13mm、φ16mm、φ17mm、φ24mm等众多机座尺寸,电机的空载转速在10000rpm-16000rpm,空心杯电机在搭配不同速比的减速机和不同分辨率的编码器后,也可以作为力矩电机以及位置反馈的装置使用。

表:空心杯电机对比(无刷vs有刷)
来源:鸣志电器官网、与非研究院整理
2.1.2、应用
空心杯电动机的应用,从军事、高科技领域进入大工业和民用领域后,十多年来得到迅速的发展,尤其是在工业发达国家,已经涉及到大部分行业和许多产品。
1、需要快速响应的随动系统。如导弹的飞行方向快速调节,高倍率光驱的随动控制,快速自动调焦,高灵敏的记录和检测设备,工业机器人,仿生义肢等,空心杯电动机能很好地满足其技术要求。
2、对驱动元件要求平稳持久拖动的产品。如各类便携式的仪器仪表,个人随身装备,野外作业的仪器设备,电动车、玩具车、电动牙刷等,同样一组电源,供电时间可以延长一倍以上。
3、各种飞行器,包括航空、航天、航模等。利用空心杯电动机重量轻,体积小,能耗低的优点,可以很大程度地减轻飞行器的重量。
4、各种各样的民用电器、工业产品。采用空心杯电动机作为执行元件。

图|空心杯电机应用
来源:鸣志电器官网
2.2、鼎智科技
公司成立于 2008 年 4 月,主要从事线性执行器、混合式步进电机、直流电机、音圈电机及其组件等产品的设计、研发、生产和销售。
空心杯电机杯可避免由于齿槽存在磁阻不均匀而引起气隙磁感应的脉振。可实现消除电枢铁心中产生脉振损耗和主极极靴表面上产生表面损耗。空心杯电机杯具有高耐用性、低电气噪声和高效率,目前电机最大效率达到91%。空心杯电机杯适用于需要快速动作、功率较大的随动系统中。

图|鼎智科技空心杯电机系列
来源:鼎智科技官网
目前,鼎智科技根据产品构思、结构设计,确定绕线原理,攻克了绕线工艺、绕线成型、线包固化等多项技术难点,具备空心杯电机自动化批产能力。现有7种系列产品,涵盖直径φ10mm至φ42mm产品线。
2.3、兆威机电
深圳市兆威机电股份有限公司(以下简称“兆威”)成立于2001年,是一家集设计、研发、制造于一体的微型驱动系统方案解决商。

图|无刷空心杯电机
来源:兆威机电官网
兆威机电无刷空心杯电机直径φ6mm-φ12mm,满足灵巧手使用范围。

图|6mm空心杯电机参数
来源:兆威机电官网

图|行星减速箱(高性能版)
来源:兆威机电官网
兆威机电齿轮箱直径φ3.4mm-φ38mm,齿轮箱减速比4-1708。
兆威机电始终关注机器人前沿技术,从微型驱动领域出发,致力帮助机器人实现应用落地。兆威机电基于对精密减速箱、高性能电机、电控系统的产品组合,适用于机器人头部、手指等运动执行等应用,具有精度高、尺寸小、重量轻等特点。
2.4、空心杯电机市场空间
在人形机器人产业链不断发展的过程中,手部方案的主流配置与目前特斯拉Optimus 的用量一致,为单台机器人12只(左右手各6只),后续随着产品成熟度提高,未来方案中为了实现更加灵巧的双手,达到单台机器人 22 只(左右手各11 只)的用量。
当人形机器人的出货量达到10万台时,单机空心杯电机的价值量大约14400元,带来的增量市场空间已经有14.4亿,增加了原本空心杯电机市场的28%左右;而当人形机器人产品出货量级达到百万时,单台空心杯电机的价值量分别为10080元、带来的增量市场空间约为101亿元。
三、国内灵巧手企业简介
3.1、因时机器人
因时机器人创立于2016年,是一家专注于微型精密运动部件研发制造和伺服控制技术突破创新的高新技术企业。典型产品包括微型伺服电缸和机器人末端执行器,在微小型、高精度和力控技术等方面具有独特优势。
微型伺服电缸是一种小型一体化直线伺服系统,是机器人、医疗器械、工业设备等精密机电设备的核心运动部件。其内部集成了空心杯电机、精密减速器、丝杠传动机构、传感器及闭环控制系统,具有体积小、精度高、功率密度大等技术特点,可以实现行程范围内任意位置精确伺服控制。内置绝对位置传感器,断电后不会丢失位置信息,无需找零位。

图|微型伺服电缸
来源:因时机器人

表|伺服电缸分类
来源:因时机器人介绍、与非研究院整理

图|微型伺服电缸
来源:因时机器人产品介绍

图|仿人五指灵巧手
来源:因时机器人官网
仿人五指灵巧手采用创新型直线驱动设计,内部集成了6个力控微型伺服电缸。单手 具有6个自由度和12个运动关节,外形美观且高度仿真,结合力位混合控制算法,具有亚 毫米级定位精度和数千克的负载能力,可以模拟人手实现精准的抓取操作。
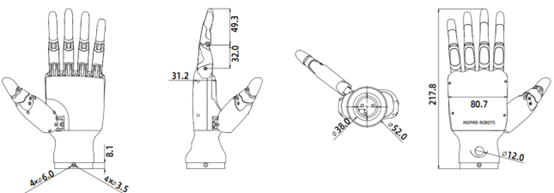
仿人五指灵巧手尺寸图
来源:因时机器人官网
因时RH56BFX系列灵巧手又称钢琴手,速度快、抓握力稍小,集成力传感器,适用于弹钢琴及手势交互等场景。支持ROS,可提供ROS插件。

图|因时RH56BFX系列灵巧手参数
来源:因时机器人官网
因时RH56DFX系列灵巧手抓握力大,速度适中,适用于机器人或假肢的抓取操作。支持ROS,可提供ROS插件。

图|因时RH56DFX系列灵巧手参数
来源:因时机器人官网
因时机器人作为灵巧手头部企业,将持续深耕微型伺服运动控制领域,力求研制出更微小更精密的运动控制零部件,为机器人行业、精密制造业及生物医疗(医美)器械行业提供更优质的产品和更专业的服务。
3.2、强脑科技有限公司
BrainCo强脑科技创立于2015年,是首家入选哈佛大学创新实验室(Harvard Innovation Lab)的中国团队,致力于成为全球领先的非侵入式脑机接口技术解决方案供应商,在康复、大健康、人机交互等领域具有领先优势。

图|智能仿生手
来源:强脑科技官网
BrainRobotics智能仿生手,是一款脑机接口技术与人工智能算法高度整合的智能产品。这款仿生手可通过检测佩戴者的神经电和肌肉电信号,识别佩戴者的运动意图,并将运动意图转化为智能仿生手的动作,从而做到灵巧智能,手随心动。


图|强脑科技仿生智能手动作
来源:强脑科技官网
强脑科技的智能仿生手基于脑机接口技术,通过采集解析使用者的神经信号,无需手术埋入电极,也可以精确控制每根手指的运动速度和位置,完成各种交互姿势。目前,该技术多用于假肢行业康复领域,未来有可能和人形机器人相结合。
3.3、思灵机器人
思灵机器人(Agile Robots)是一家全球领先的智能机器人明星企业,公司创立于2018年,立足全球化发展,在德国慕尼黑、中国北京设立双总部,以德国宇航中心为技术依托,致力于推动机器人技术探索与创新,并拓展机器人在更多领域的推广应用。

图|仿人型五指智能灵巧手
来源:思灵机器人官网

表|仿人型五指智能灵巧手指标

图|灵巧手可实现动作
来源:思灵机器人官网
思灵机器人五指灵巧手是世界领先的高度集成化和模块化的多指力控机器人灵巧手,由 4个模块化的多关节手指和1个具有主动对掌功能的拇指组成,整手外观上略小于正常成年男性手,具有拟人的外观和功能。五个手指均具有仿人型的运动轨迹,得益于拇指的对掌性,五指灵巧手可以复现多种人手的抓取类型。5 个手指均集成有力传感器和位置传感器等,可实现多传感器融合的抓取算法,以保证机器人手与环境交互的柔顺性。
3.4、蓝胖子机器智能
深圳蓝胖子机器智能有限公司成立于2014年,运用计算机视觉、运动规划、自主导航、多机协作、机器学习等人工智能技术,为物料、快递、电商、海港、空港、先进制造等场景,提供包含上件、分拣、运输、装卸等环节的一站式解决方案。

图|3指、5指灵巧手
来源:蓝胖子机器智能官网
采用模块化设计,有效解决多指灵巧手成本高、不易维护的痛点,可应用于机器人灵巧手操作及多种类物品的复杂抓取场景。产品同时采用特殊的传感器设计,结合多自由度配置,既能适应绝大部分物体的抓取需求,又能降低灵巧手成本,从而推广其在科研、工业、服务等领域的应用。

表|方案参数
来源:蓝胖子机器智能官网

表|产品特点
来源:蓝胖子机器智能官网
四、总结
灵巧手技术壁垒较高,目前国外一些灵巧手技术先进,但是设计难度大,零部件多, 所以价格很高,一般用于科研领域,如Shadow灵巧手报价约220万元/只。用于假肢领域的仿生灵巧手灵活程度稍差一些,但价格也相对较低,如德国的Bebionic仿生灵巧手价格至少32万元/只。国内强脑科技的BrainRobotics仿生灵巧手应用领域是假肢行业,标准版价格是10.8万元/只。因时机器人是国内商业级五指灵巧手的龙头企业,因时灵巧手与特斯拉灵巧手有着类似的关节数和相同的电机数目,现在价格为5万元/只。
目前,国内外灵巧手行业尚处于早期阶段。国内灵巧手生产商有望凭借降本优势进入特斯拉这样的人形机器人本体生产商的供应链。随着国内人形机器人优必选、小米、智元等人形机器人产品逐渐定型,未来出货量将逐步提高,也必将带动灵巧手行业快速发展。

 下载ECAD模型
下载ECAD模型







.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)


.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)




 [课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
[课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
