


 立即注册,领取新人专属福利!
立即注册,领取新人专属福利! 905
905
搭载了高速公路自动驾驶等功能的汽车原则上是与人类驾驶员“协同”工作的。但最大的问题是,大多数车厂对我们在现实世界中的驾驶行为几乎一无所知。问题在于,当人类驾驶员和部分自动驾驶的车辆双方都对对方一无所知时,如何进行协作。
想象一下,当汽车停止自动驾驶功能并要求驾驶员接管的场景。突然之间,驾驶员必须承担起责任,不管他/她在认知上或身体上是否准备好接管。
这是车厂对人类驾驶员一厢情愿的期望,而人类驾驶员对此并没有准备充分。
“协同驾驶”是建立在一个谬误之上的。当机器或人类驾驶员对另一方的行为或即将采取的行动了解甚少时,双向协作变得几乎不可能。
真实世界的数据
关于机器到人类驾驶接管的问题,有大量扎实的学术研究和技术论文。这一研究方向提出了诸如人类驾驶员表现出“模式混淆(mode confusion)”或“脱离循环(out of the loop)”等问题。一个突出的担忧是人类倾向于“过度信任”部分自动驾驶汽车的技术。
这些研究中缺少的是关于人类在驾驶部分自动驾驶汽车时的真实世界行为数据,例如:
- 对于汽车的接管请求,典型的直接反应是什么?
- 驾驶员接下来会做什么?
- 驾驶员的视线注意力会发生变化吗?
- 驾驶员首先关注什么?接下来又是什么?
- 驾驶员需要多长时间才能控制汽车?
- 驾驶员何时才能达到稳定的手动驾驶状态?
AVT(The Advanced Vehicle Technology)联盟,一个学术产业合作伙伴关系,最近发布了一项关于使用Super Cruise部分自动驾驶系统时人类行为的现实世界研究结果。
MIT交通与物流中心的研究科学家Bryan Reimer在最近的解释说,这个研究结果“提供了一个窗口,展示了在真实世界、自然驾驶条件下与系统启动的控制转换相关的实际驾驶员行为。”
Reimer认为,这项研究为OEM、供应商、监管机构和其他利益相关者提供了“客观数据”,以开始了解如何开发更安全的协同驾驶体验及其可能的权衡,“平衡便利性、舒适性和安全性。”
实验设置
AVT的设置非常简单。在一个“自然”的环境中使用数据收集方法,“14名驾驶员每人驾驶一辆搭载了Super Cruise的凯迪拉克CT6一个月。Super Cruise是一种部分自动驾驶系统,启动后可以实现脱手驾驶”。根据已发表的论文,车辆配备了不间断记录数据的数据采集系统,包括:(i) CAN总线,用于确定车辆动力学、驾驶员与车辆控制器的互动以及车内自动驾驶系统的状态;(ii) GPS记录位置;(iii) 4个720p摄像头(30fps)分别捕捉驾驶员的面部、车厢、仪表盘和前方道路状况。
该研究旨在“描述自动驾驶发起的解除请求发生的特征,并评估驾驶员的响应和恢复行为。”
该研究还量化了“自动驾驶解除之前和之后视觉注意力的变化”,并分析了“驾驶员凝视和手握方向盘行为的时刻分布特性。”
主要作者、MIT的研究科学家Pnina Gershon解释说,该研究提供了关于“驾驶员如何动态分配视觉注意力以及在自动驾驶发起的解除后恢复控制所需时间”的见解。
测量内容
AVT研究中最值得注意的是,它以30fps的速度逐帧标注驾驶员的注视位置。研究人员将注视分为四类:(i) 道路(注视前风挡的方向);(ii) 仪表组(仪表盘/方向盘位置);(iii) 下方和中控(中央控制台、舱内多媒体以及向下或大腿位置);(iv) 镜子(左、右窗户或侧视镜,以及后视镜)。
该研究还根据手的位置逐帧标注驾驶员的方向盘控制水平。所使用的类别包括:(i) 脱手(无需双手驾驶);(ii) 一只手;(iii) 两只手;及(iv) 不可见。
研究结果
研究发现的最具启示性的人类行为是,在关键时刻,当Super Cruise通知驾驶员自动驾驶已解除并要求驾驶员接管时,驾驶员会将目光从道路上移开,开始在车内其他地方四处张望,特别是在仪表组上。
值得注意的是,数据显示驾驶员对道路的“整体视觉注意力较低且更碎片化”,特别是在潜在的时间关键驾驶情境要求全神贯注时。
AVT数据显示,在Super Cruise发起的解除自动驾驶后,注视道路的比例减少(Q50Before=0.91,Q50After=0.69;Q85Before=1.0,Q85After=0.79),注视仪表组的比例增加(Q50Before=0.14,Q50After=0.25;Q85Before=0.34,Q85After=0.45),以及注视道路的平均时长在Q85中减少了4.86秒。
研究还发现,在解除自动驾驶后,注视位置之间的转换次数增加了43%。
驾驶员的这种注视行为变化是一个严重的问题。它们显示在有限数量的注视位置之间频繁转换,同时将驾驶员长时间注视道路的时间缩短了73%。
AVT研究的作者认为,这种反应反映了驾驶员寻求解释自动驾驶解除和/或自动驾驶状态的信息的愿望。他们称之为“信息寻求行为”。
Gershon还指出了另一个令人惊讶的发现。研究发现,“接管请求的影响并不在驾驶员接管方向盘的那一刻结束。”注视行为的变化持续了相当长的一段时间。她指出,“我们继续观察到驾驶员视觉注意力在接下来的几秒钟里仍受到影响。”
需要多少秒?
研究显示,当进行脱手驾驶时,与至少一只手握方向盘驾驶相比(1.8秒),接管时间显著更长(2.4秒)。
AVT研究通过识别脱手驾驶过程中的“延迟、反应和恢复时间段”,深入研究了接管期。
正如Gershon解释的,“延迟”是指从自动驾驶解除请求开始到行为发生变化(注视/握方向盘)的时间。“反应”阶段的特点是在延迟期后出现行为变化,然后进入恢复期。“恢复期”由在评估窗口期间不发生变化的稳定行为表示。
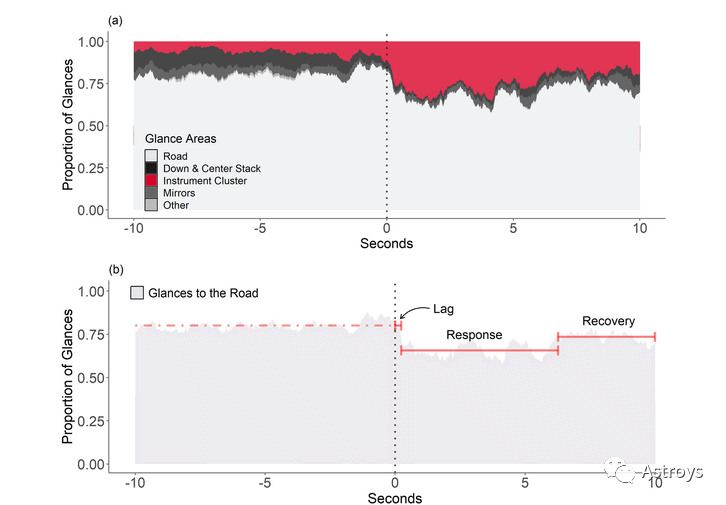
(a) 在自动驾驶解除前10秒和解除后10秒内,不同注视区域的注视比例。自动驾驶解除发生在0秒,用虚线标出。(b) 随着时间的推移,道路注视比例,趋势稳定的注视行为时期(延迟、反应和恢复)用水平线标出。(来源:AVT)
AVT对接管过程中瞬间视觉注意力和方向盘控制的分析表明,“平均而言,驾驶员需要6.1秒的时间开始恢复对道路的注视行为,以及1.5秒的时间将至少一只手放在方向盘上。”
当汽车寻求帮助时,人类需要多少秒钟来接管是汽车专家们激烈讨论的焦点。最常引用的猜测是至少三秒钟。
Gershon解释说:“接管所需的充足时间与驾驶员预防不良后果的时间预算、驾驶环境、驾驶员状态和驾驶员能力有关。在我们的数据中,我们发现在高速公路上进行脱手驾驶时,接管平均需要2.4秒。”
但她强调:“我认为这仍然是一个需要更多数据和更多背景的悬而未决的问题。”她指出,“AVT还有很多研究将有助于加深我们的理解。”
要点
鉴于对驾驶员“注视行为”的理解发生了如此巨大的变化,系统和HMI设计变得至关重要。
车厂如何才能将驾驶员调整注视以响应车辆自动驾驶状态变化的延迟时间减到最小?
AVT研究认为,“提供与自动驾驶解除相关的易于理解和充足信息的设计”对于“更顺畅的过渡和更快的恢复”至关重要。
AVT成立于2015年,今拥有30多家赞助商,包括车厂、保险公司、Tier1和研究机构。根据Reimer的说法,其目标是为OEM提供高保真数据,使OEM能够构建“以人为本的系统”。
AVT联盟的关键架构师Reimer怀疑,一些成员“在一段时间里已经接触到这些和其他比较数据,他们已经开始改变以获得市场优势。”
权衡取舍
Reimer指出,设计部分自动驾驶汽车的关键在于“平衡便利性、舒适性和安全性”。
车厂应该通过部署部分自动驾驶为驾驶员提供多大程度的便利?驾驶员应该感到多舒适?
驾驶员是否相信该系统能够在可能出现问题时发出警报?还是驾驶员会确信,尽管系统的自动驾驶能力有限,但它会在那里保护他?
自动驾驶将使驾驶变得多安全?
或许最重要的是,Reimer指出:“所有这些因素如何共同支持协同驾驶体验中校准好的信任水平。”
实际上,“校准信任”是什么?
Reimer认为,每家OEM都在试图寻找平衡。AVT希望车厂可以利用其研究来设立基准,确定系统面临改进困难的领域,并“最终从辅助和自动驾驶中获得更强的安全效益”。
安全专家长期以来一直警告我们部分自动驾驶的困境。但是具有高速公路脱手驾驶功能的车辆正在迅速成为现实。这种技术的推进迫使汽车设计师预测人类驾驶员在关键安全时刻的行为,并开发一种至少可以简化接管过程的人机界面。



-%E5%89%AF%E6%9C%AC.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
-1.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)

.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)

.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)


.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
 [生态]STM32 合作伙伴计划:打造生态强纽带
[生态]STM32 合作伙伴计划:打造生态强纽带
