|
|
上一篇说原理,简单介绍,这篇只要讲编程的
四、加速度轴方向

符合迪卡儿坐标系(右手坐标系)

五、关键代码如下
值得注意的是 SPI定时方案遵循CPHA = CPOL = 0
第一个上升沿采样,空闲状态为低电平
ADSENSORAPP_RESULT_TYPE ADXL362_Init()
{
ADSENSORAPP_RESULT_TYPE result;
ADI_SPI_RESULT_TYPE status = ADI_SPI_SUCCESS;
uint8_t TxD[10]= {0}, RxD[10]= {0};
status = adi_SPI_SetChipSelect(hSPI1Dev, ADXL362_CS);
if (ADI_SPI_SUCCESS == status)
status = adi_SPI_SetBitrate (hSPI1Dev, ADXL362_SPI_CLK); //4MHz SCLK
//设置运动 与静止阀值
TxD[0]= XL362_REG_WRITE; //Command Byte = WRITE (0x0A)
TxD[1]= XL362_THRESH_ACTL; //Starting Register Address XL362_THRESH_ACTL = 0x20
TxD[2]= 150; //Data to write to register XL362_THRESH_ACTL (0x20) = 105
TxD[3]= 0; //Data to write to register XL362_THRESH_ACTH (0x21) = 0
TxD[4]= 0; //Data to write to register XL362_TIME_ACT (0x22) = 3 (secs)
TxD[5]= 105; //Data to write to register XL362_THRESH_INACTL (0x23) = 105
TxD[6]= 0; //Data to write to register XL362_THRESH_INACTH (0x24) = 0
TxD[7]= 0; //Data to write to register XL362_TIME_INACTL (0x25) = 37 (3 secs)
TxD[8]= 0; //Data to write to register XL362_TIME_INACTH (0x26) = 0
TxD[9]= 0x3F;//Data to write to register XL362_ACT_INACT_CTL (0x27) = 0x3F
//TxD[10]= 0x00;//Data to write to register XL362_FIFO_CONTROL (0x28) = 0x00
//TxD[11]= 0x00;//Data to write to register XL362_FIFO_SAMPLES (0x29) = 0x00
if (ADI_SPI_SUCCESS == status)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0], 10); //Write & Read Register Data
//配置中断模式 电低为效中断, 使能唤醒与运动中断
//+-2G 滤波0DR=12.5HZ
//最后设置 POWER_CTL 开始工作
TxD[0]= XL362_REG_WRITE; //Command Byte = WRITE (0x0A)
TxD[1]= XL362_INTMAP1; //Starting Register Address XL362_INTMAP1 = 0x2A
TxD[2]= 0x50;//Data to write to register XL362_INTMAP1 (0x2A) = 0x00
TxD[3]= 0x00;//Data to write to register XL362_INTMAP2 (0x2B) = 0x00
TxD[4]= 0x00;//Data to write to register XL362_FILTER_CTL (0x2C) = 0x00
TxD[5]= XL362_MEASURE_3D;//Data to write to register XL362_POWER_CTL (0x2D) = 0x00
if (ADI_SPI_SUCCESS == status)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0], 6); //Write & Read Register Data
if(ADI_SPI_SUCCESS == status)
result = API_SUCCESS;
else
result = API_FAIL;
return result;
}
ADSENSORAPP_RESULT_TYPE Get_Data_From_ADXL362()
{
ADI_SPI_RESULT_TYPE status = ADI_SPI_SUCCESS;
uint8_t TxD[6]= {0}, RxD[6]= {0};
int16_t RxD_temp[3]= {0};
status = adi_SPI_SetChipSelect(hSPI1Dev, ADXL362_CS);
if(ADXL362_SPI_CLK != (adi_SPI_GetBitrate(hSPI1Dev)))
status = adi_SPI_SetBitrate (hSPI1Dev, ADXL362_SPI_CLK); //4MHz SCLK
#ifdef READ_8_BIT_DATA
TxD[0]= XL362_REG_READ;//Command Byte = READ (0x0B)
TxD[1]= XL362_XDATA8;//X-Data Reg.Addr = XDATA8 (0x08)
TxD[2]= XL362_YDATA8;//Y-Data Reg.Addr = YDATA8 (0x09)
TxD[3]= XL362_ZDATA8;//Z-Data Reg.Addr = ZDATA8 (0x0A)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0],6); //Write & Read Register Data
if (status == ADI_SPI_SUCCESS) {
SensData.ADXL362[0] = RxD[2];
SensData.ADXL362[1] = RxD[3];
SensData.ADXL362[2] = RxD[4];
return API_SUCCESS;
}
#else
TxD[0]= XL362_REG_READ;//Command Byte = READ (0x0B)
TxD[1]= XL362_XDATAL;//XL-Data Reg.Addr = XL362_XDATAL (0x0E)
TxD[2]= XL362_XDATAH;//XH-Data Reg.Addr = XL362_XDATAH (0x0F)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0],4); //Write & Read Register Data
RxD_temp[0] = (int16_t) ((RxD[3]<<8) | RxD[2]);
//RxD_temp[0] = RxD_temp[0] & 0x0FFF;
TxD[0]= XL362_REG_READ;//Command Byte = READ (0x0B)
TxD[1]= XL362_YDATAL;//YL-Data Reg.Addr = XL362_YDATAL (0x10)
TxD[2]= XL362_YDATAH;//YH-Data Reg.Addr = XL362_YDATAH (0x11)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0],4); //Write & Read Register Data
RxD_temp[1] = (int16_t) ((RxD[3]<<8) | RxD[2]);
//RxD_temp[1] = RxD_temp[1] & 0x0FFF;
TxD[0]= XL362_REG_READ;//Command Byte = READ (0x0B)
TxD[1]= XL362_ZDATAL;//ZL-Data Reg.Addr = XL362_ZDATAL (0x12)
TxD[2]= XL362_ZDATAH;//ZH-Data Reg.Addr = XL362_ZDATAH (0x13)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0],4); //Write & Read Register Data
RxD_temp[2] = (int16_t) ((RxD[3]<<8) | RxD[2]);
//RxD_temp[2] = RxD_temp[2] & 0x0FFF;
if (status == ADI_SPI_SUCCESS) {
SensData.ADXL362[0] = RxD_temp[0];
SensData.ADXL362[1] = RxD_temp[1];
SensData.ADXL362[2] = RxD_temp[2];
return API_SUCCESS;
}
#endif
else {
SensData.ADXL362[0] = 0;
SensData.ADXL362[1] = 0;
SensData.ADXL362[2] = 0;
return API_FAIL;
}
}
ADSENSORAPP_RESULT_TYPE SoftReset_ADXL362_Sensor()
{
ADSENSORAPP_RESULT_TYPE result = API_SUCCESS;
ADI_SPI_RESULT_TYPE status=ADI_SPI_SUCCESS;
uint8_t TxD[3]= {0}, RxD[3]= {0};
TxD[0]= XL362_REG_WRITE;//Command Byte = WRITE (0x0A)
TxD[1]= XL362_SOFT_RESET;//ADXL362_SOFT_RESET_REG = 0x1F
TxD[2]= XL362_SOFT_RESET_KEY; //ADXL362_SOFT_RESET_KEY = 0x52
status = adi_SPI_SetChipSelect(hSPI1Dev, ADXL362_CS);
if(ADXL362_SPI_CLK != (adi_SPI_GetBitrate(hSPI1Dev)))
status = adi_SPI_SetBitrate (hSPI1Dev, ADXL362_SPI_CLK); //4MHz SCLK
status = API_SPI_RW_Byte(TxD, RxD, 3);
if (status == ADI_SPI_SUCCESS)
result = API_SUCCESS;
else
result = API_FAIL;
return result;
}
uint16_t ADXL362_Delay = 1000;
ADSENSORAPP_RESULT_TYPE Detect_ADXL362_Sensor()
{
ADI_SPI_RESULT_TYPE status=ADI_SPI_SUCCESS;
uint8_t TxD[5]= {0}, RxD[5]= {0};
status = adi_SPI_SetChipSelect(hSPI1Dev, ADXL362_CS);
if(ADXL362_SPI_CLK != (adi_SPI_GetBitrate(hSPI1Dev)))
status = adi_SPI_SetBitrate (hSPI1Dev, ADXL362_SPI_CLK); //4MHz SCLK
SoftReset_ADXL362_Sensor();//复位
adsAPI_Delay(ADXL362_Delay);
//读取ID
TxD[0]= XL362_REG_READ;//Command Byte = READ (0x0B)
TxD[1]= XL362_DEVID_AD;//ADXL362_DEVID_AD Reg.Addr = 0x00
TxD[2]= XL362_DEVID_MST; //ADXL362_DEVID_MST Reg.Addr = 0x01
TxD[3]= XL362_PARTID;//ADXL362_PARTID Reg.Addr = 0x02
if (ADI_SPI_SUCCESS == status)
status = API_SPI_RW_Byte(&TxD[0],&RxD[0],5); //Write & Read Register Data
if (ADI_SPI_SUCCESS == status) {
if((RxD[2] == 0xAD)&&(RxD[3] == 0x1D)&&(RxD[4] == 0xF2))
return API_SUCCESS;
else
return API_FAIL;
}
return API_FAIL;
}
六、结果
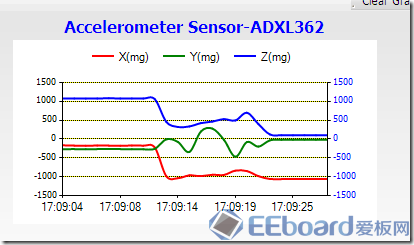
值很大,实质是没进行转换,比例因子如下

代码修改如下
ADSENSORAPP_RESULT_TYPE Get_Data_From_ADXL362()
{
。。。。。。。。。。。。。。。。。。。。。。。。。。。。
if (status == ADI_SPI_SUCCESS) {
#if 0
SensData.ADXL362[0] = RxD_temp[0];
SensData.ADXL362[1] = RxD_temp[1];
SensData.ADXL362[2] = RxD_temp[2];
#else
SensData.ADXL362[0] = (float)RxD_temp[0]/1000;//2g ->1000 4g ->500
SensData.ADXL362[1] = (float)RxD_temp[1]/1000;// 8g->250
SensData.ADXL362[2] = (float)RxD_temp[2]/1000;
#endif
return API_SUCCESS;
}
#endif
。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。
}

运动学中,g的单位为m/s^2,1g = 9.8m/s^2 重力加速度 |
|


 发表于 2016-2-17 09:37:47
发表于 2016-2-17 09:37:47
 /5
/5 
