


 7153
7153

第一 二章 小车硬件介绍-(全网最详细)基于STM32智能小车-蓝牙遥控、避障、循迹、跟随、PID速度控制、视觉循迹、openmv与STM32通信、openmv图像处理、smt32f103c8t6
第一篇-STM32智能小车硬件介绍
后续章节也放这里 持续更新中,视频发布在小B站里面。这边也会更新。
STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机 跟随
小B站链接:https://www.bilibili.com/video/BV16x4y1M7EN/?spm_id_from=333.337.search-card.all.click&vd_source=16940ba3adbc66f0fb14e0c1d87db878
后面章节持续跟新的
第三 四章-OLED使用 和串口openmv图像处理小车硬件介绍-(全网最详细)基于STM32智能小车-蓝牙遥控、避障、循迹、跟随、PID速度控制、视觉循迹、openmv与STM32通信、
第五章-PWM控制电机 开源stm32循迹小车详细制作过程(附加完全版代码)-openmv视觉循迹、红外循迹、避障跟随、超声波跟随、蓝牙遥控 m32f103c8t6、stm32cubemx
后面还有视觉、RTOS等功能先不列举了,大家直接到专栏看把。
1.1-元件选型
这里给出元件列表和数量
后面每个元件使用前会给出参数等。

1.2-原理图与PCB
底板原理图
各个模块的供电电压?
模块接口引脚顺序?
如何确定使用单片机那个引脚?

STM32F103C8T6核心板原理图(可能使用不同核心板略有差异)

PCB顶层截图
不同类型线粗细
布局总线方式

1.3-焊接
PCB正面

PCB背面

然后插上元件

1.4-结构与组装
这是组装好的车体照片

然后小车安装PCB
注意电机和红外对管不要插错

1.5-测试
第二章-GPIO与中断
2.0-新建工程

建议选择和我一样的版本

新建一个工程

选择芯片

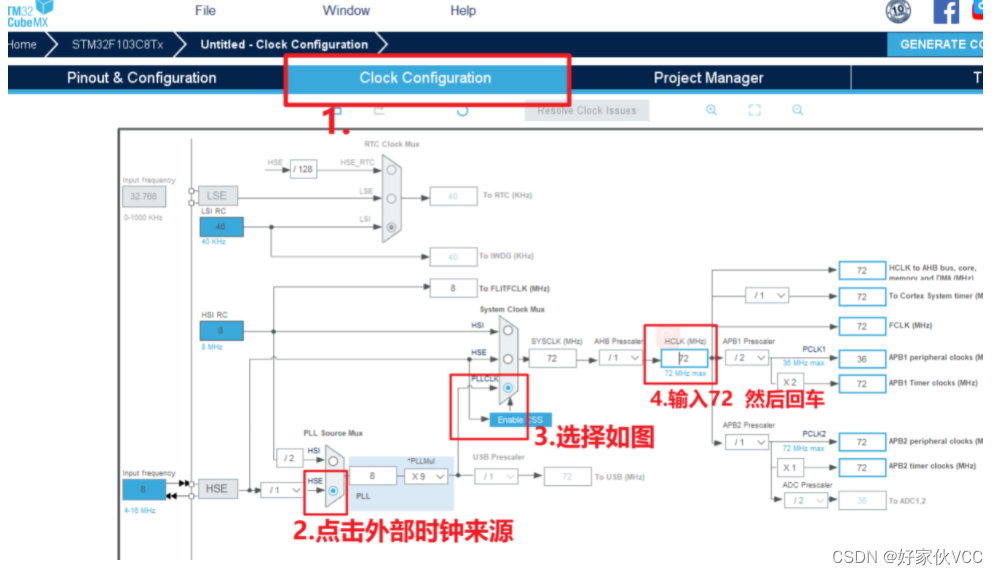
选择时钟源
选择调试

勾选生成独立的文件

设置保存地址

勾选这个不添加没有使用库文件可以减小工程文件大小(也可以不勾选,保持默认设置)

MDK打开工程,调低优化等级

以上是每次新建工程要做的
以后我们不在新建工程,使用之间的工程即可
2.1-点灯
这里我们点亮PC13连接的小灯

配置PC13

生成代码

生成代码后,使用MDK打开工程


在BEGIN和END添加代码
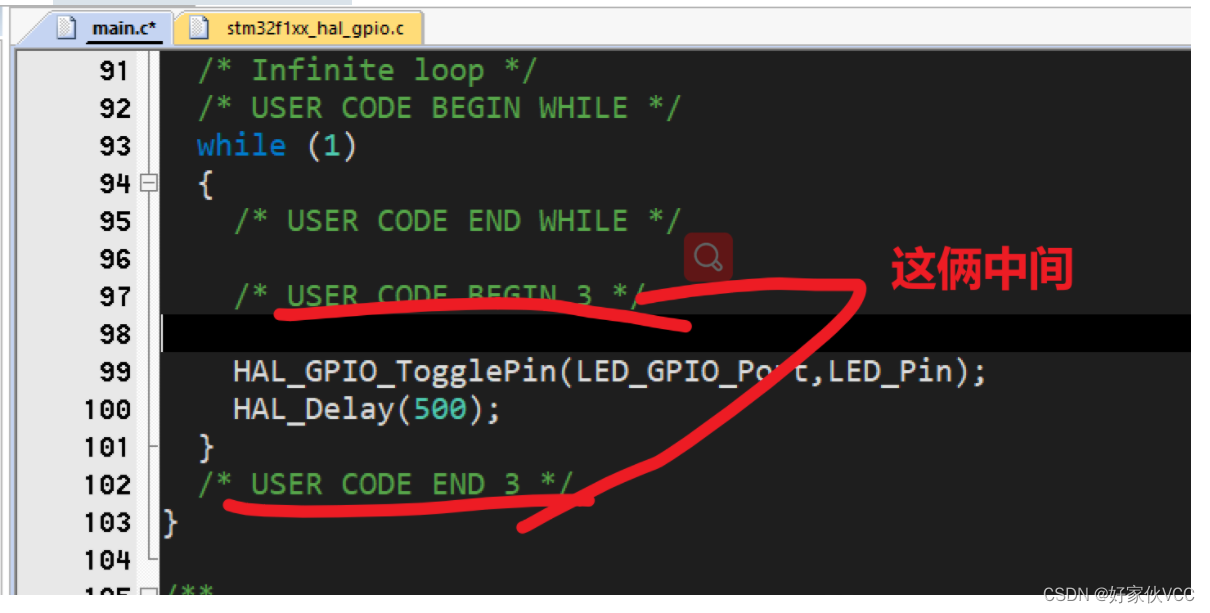
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
HAL_Delay(500);根据自己的芯片选择

烧录程序(必看 使用其中一个方法)

方法一:使用DAP LINK

DAP 在Win 10 免驱动的
然后根据自己使用的工具在MDK中设置下载工具

设置下载算法

然后下载程序,复位小灯闪烁

烧录后现象
小灯每0.5秒闪烁一次
方法二:使用stlink
接线图
STlink不要接3.3V

使用Stlink 前先安装驱动

双击运行

选择ST-Link

选择算法

然后点击编译,烧录

烧录后现象
小灯每0.5秒闪烁一次
补充可能遇到的失败情况
使用DAP-LINK
如果我们芯片IDCODE是0x2 开头的那么我们需要替换一下Keil 的器件包
(如果你是0x1 开头的,如果能下载可以不替换)

STM32小车相关资料V3.3.0�4使用的软件中科芯CKS芯片支持包


下面这个算法就会自动切换

使用stlink
2.2-按键
先看原理图
PB4–KEY1 单片机设置下拉输入-、上降沿触发
PA12–KEY2 单片机设置上拉输入、下降沿触发

开始配置

使能外部中断

然后生成代码
重新实现中断回调函数、编写按键检测程序

在gpio.c 中我们编写该函数

void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == KEY1_Pin){//判断一下那个引脚触发中断
//这里编写触发中断后要执行的程序
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//切换LED GPIO状态
}
if(GPIO_Pin == KEY2_Pin){//判断一下那个引脚触发中断
//这里编写触发中断后要执行的程序
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);//切换LED GPIO状态
}
}
把main中控制闪烁注释掉

烧录后的现象
按下KEY1 或者KEY2可以切换LED灯开关状态
联系:Q,1930299709

 下载ECAD模型
下载ECAD模型







 [课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
[课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
