


















 1.5万
1.5万

本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加互补滤波作为姿态解算算法,PID作为控制器,实现飞行,云台增稳等功能。具有灵活轻盈,延展性,适应性强好等特点。
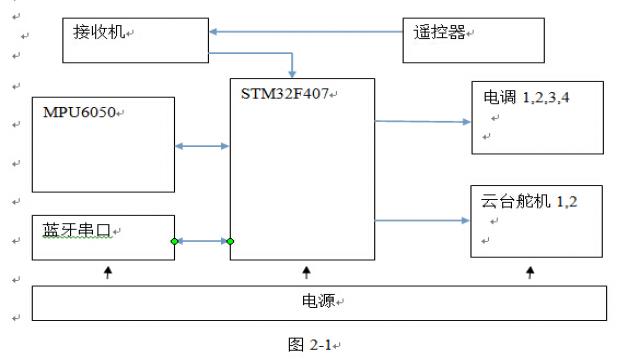
设计采用STM32F4作为核心处理器,该处理器内核架构 ARM Cortex-M4,具有高性能、低成本、低功耗等特点。主控板包括传感器MPU6050电路模块、无线蓝牙模块、电机启动模块,电源管理模块等;遥控使用商品遥控及接收机。控制芯片捕获接收机的PPM命令信号,传感器与控制芯片之间采用IIC总线连接,MCU与电调之间用PWM传递控制信号。软件算法才用基于四元数的互补滤波解算姿态叫,控制算法才用经典PID控制器控制云台舵机和四轴电机。下图为本设计总体框图。
- 系统硬件设计:针对前面提出的整体设计方案,本设计采取模块化策略,将各个功能部分开来设计,最后组合起来。
- 电源管理模块:四轴飞行器要求整体设计质量较轻,体积较小,因此在电池的选取方面,采用体积小、质量轻、容量大的锂电池供电最合适。系统的核心芯片为STM32F103,常用工作电压为3.3V,同时惯性测量传感器,蓝牙通信模块的常规供电电压也为3.3V,锂电池的电压为11.4V,要使系统正常工作,需要将11.4V的锂电池电压稳压到3.3V。常用的78系列稳压芯片已不再适用,必须选择性能更好的稳压芯片。
经综合考虑,本电路采用LM1117-3.3和LM2940-5电源部分的核心芯片。电池电源经过LM2940-5降到5V后在输入LM1117-3.3稳压为3.3V。由于电机部分电流较大,故在飞控电路部分加入了过流保护,使用500mA的保险丝。
阅读全文










