126
126
开源飞控:支持气压计、超声波定高、户外GPS定点、定速巡航,部分视频链接如下:
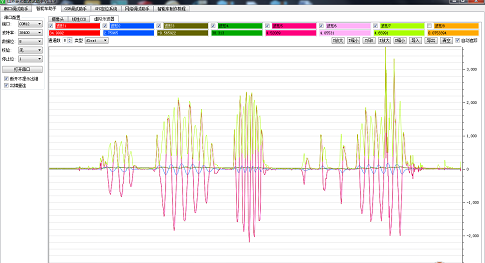
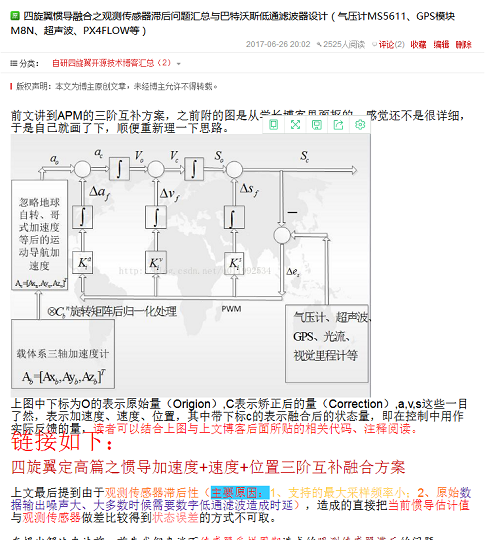
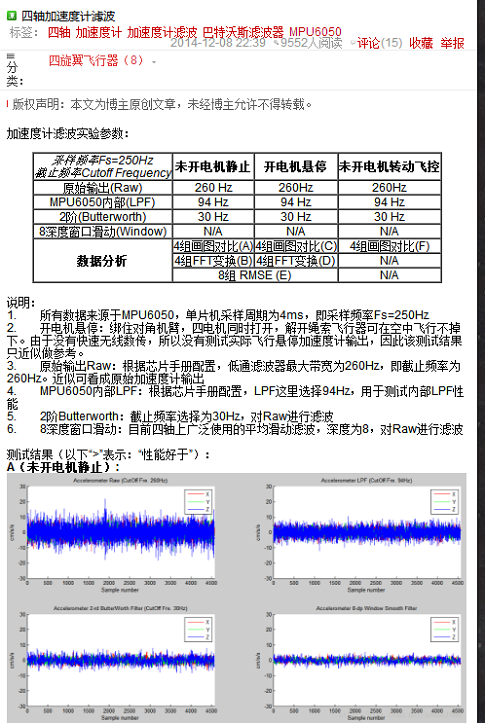
1、四旋翼的传感器滤波(针对传感器不同使用情况:姿态解算、惯导、控制、传感器矫正等)分别采用窗口滑动滤波、不同截止频率的巴特沃斯数字低通滤波器);2、姿态解算(互补滤波、梯度下降法等); 3、惯性导航(经典回路反馈法即APM三阶段互补滤波,单观测器的卡尔曼滤波,双观测量的卡尔曼滤波,观测传感器延时修正处理等);
4、控制算法(经典PID控制、前馈控制、自抗扰控制ADRC)等。
多旋翼飞行器飞行控制系统(简称飞控)是我们团队历届主研项目,团队13年即开始第一代飞控的研究,从最开始的小四轴,到后来的多旋翼飞控,经历N个版本改进,经历无数次断桨、射桨、炸机,一步一步完善与改进,整合除了目前我们这款对外开源的飞控。团队历来贡献者均就职于无人机公司做算法相关工作。目前我们的飞控更加完善,更加稳定,更加适合学习,主要核心代码自写率达到百分之90以上,代码基本上是逐行注释,整个飞控框架清晰明了,模块化封装规范,方便大家学习与二次开发。由于作者目前仍然在校,主研项目仍为飞控,个人时间比较多,可和大家一同交流学习。 我们的服务宗旨是:打造国内功能最多、性能最好、成本最低、可玩性最强的开源飞控学习平台。帮助大家以最小的代价、最大的获得感、最快的速度学习飞控相关算法,顺利完成进阶逆袭!!! |
团队主要成员CSDN开源技术博客汇总
,充分展现我们开源共享、共同进步的创客精神,不废话了,直接上图:
部分技术博客截图:

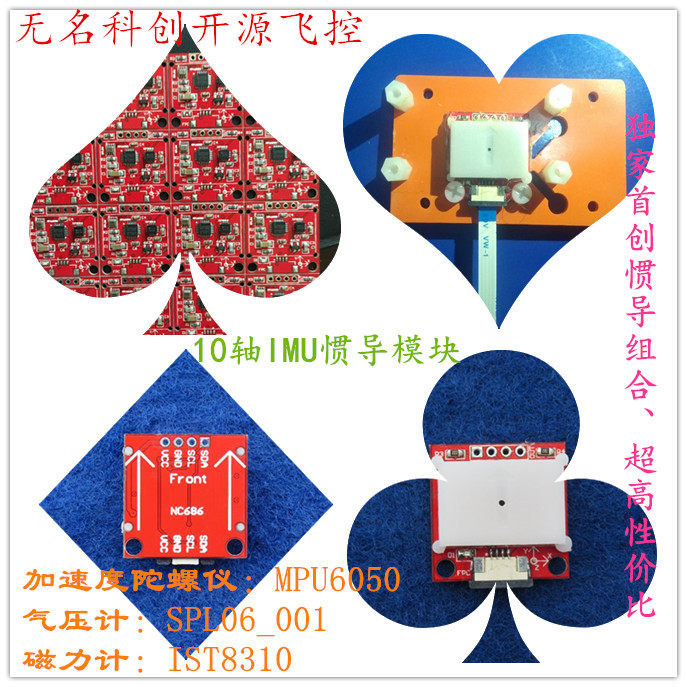
无名科创开源飞控:独家首创10轴IMU组合:MPU6050(加速度计、陀螺仪)+IST8310(DJI同款磁力计)+SPL06-001(歌尔高精度气压计、媲美MS5611),MCU:STM32F103RCT6,这是一款强大的飞控,主频72Mhz,flash 256K,板载10 Axis传感器,3轴陀螺,3轴加速度,3轴磁罗盘,高精度气压计。适合新手学习无刷飞控,更适合玩家做多种拓展和二次开发,飞控预留多个串口,可外接各种附加设备,已实现超声波定高、气压计定高、GPS定点等功能,代码完全开源。
| 无名科创开源飞控学习平台: |
| 1、飞控板与IMU分离式设计 |

2、采用3D打印的IMU气压防护罩
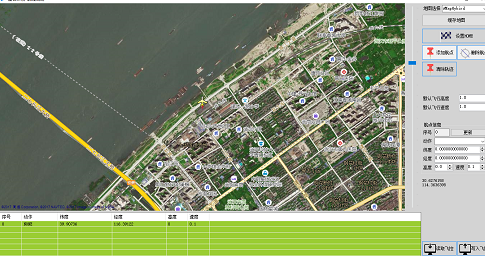
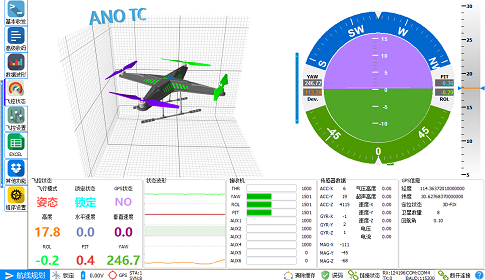
4、支持多家上位机与地面站,方便调试