


 364
364
“作为L2+/L2++级自动驾驶技术的关键功能之一,领航辅助,尤其是高速领航辅助,将在今年迎来量产上车的爆发关键节点。”MINIEYE创始人兼CEO刘国清近日在接受盖世汽车采访时如此表示。
事实的确如此。从去年开始,越来越多车企在新车型中规划了高速领航辅助功能,而在今年,特别是下半年,很多装配有相关功能的新车型将会陆续推出。不仅如此,智能驾驶解决方案提供商们也竞相亮出新的解决方案,以进一步提升高速领航辅助功能装配率。
MINIEYE就于日前公布了自研的低算力配置iPilot方案,并发布了一段路测视频。视频中,测试车在高速公路场景下完成了“收费站至收费站”的领航辅助驾驶,全程零接管。据MINIEYE透露,该方案采用1V5R传感器配置,计算平台算力只有3TOPS。
“市场需要更具成本优势的iPilot方案”
如今,智能汽车产业发展迅速,自动驾驶市场需求也逐渐多元化、细分化。MINIEYE认为,在高端市场,智能汽车产品需要预埋丰富的传感器硬件才能支撑持续迭代升级的智能化、自动化体验,而在不断下探的平价市场,兼具价格与功能优势的性价比需求也在逐渐提升。
刘国清表示,不同于城区领航辅助驾驶对于传感器配置及算力的较高要求,更具性价比的传感器组合即可满足高速领航辅助驾驶需求,“市场也需要更具成本优势的产品来提升装配率。”
也正因如此,MINIEYE于近期推出了自研低算力iPilot方案。正如前文所说,MINIEYE低算力iPilot方案算力为3TOPS,传感器配置为1V5R,即1个200万像素前视摄像头、1个前向雷达、4个角雷达,同时引入高精地图定位模组。通过这套硬件配置,低算力iPilot方案具备自动上下匝道、自主变道超车、最优车道选择、极限加塞应对、智能过弯行驶等功能。
1V5R方案配置图;图片来源:MINIEYE
“我们之所以要推出这样一个低算力的解决方案,最核心的一个考虑点是,希望能够丰富我们的产品矩阵,为不同客户不同定位的车型提供适合它们的L2++级解决方案。”刘国清如此表示。
业界周知,在高速领航辅助应用全面铺开的同时,城区领航辅助功能也在不断突破,小鹏、蔚来、理想、长城等车企正积极进行相关实践,MINIEYE等相关方案提供商也不断加码相关技术的升级迭代,拿出更高阶的城区领航辅助方案。
据盖世汽车了解,在低算力iPilot方案之前,MINIEYE就已推出高配(7V5R2L)、中配(6V5R/7V5R)iPilot方案,其中7V5R2L版iPilot方案于去年底发布,该方案采用了7V5R2L组合,即7颗摄像头、5颗毫米波雷达及2颗激光雷达,其中前视方向为两颗800万像素高清摄像头,激光雷达为96线。基于该组合,MINIEYE这一方案的应用场景就覆盖了高速公路、城市快速路等结构化道路以及城区道路。
7V5R2L方案配置图;图片来源:MINIEYE
而据刘国清透露,目前其高配及中配iPilot方案都已有量产项目,且都会在今年陆续量产交付,另围绕最新推出的具备更高性价比的低配方案,MINIEYE目前也在与多家比较头部的车企进行相应的测试和联调。“我相信,随着L2+级别功能装配量的提升,大家对于高性价比方案的需求会越来越高,我们这一方案也会有越来越多的市场。”
“实现L2++功能,不一定要去堆料”
具备高性价比的低算力iPilot方案确有市场需求,当然前提条件是,这一方案要足够满足L2+/L2++高速领航辅助驾驶要求。
需要指出的是,尽管相对于城区领航辅助,高速路、城市快速路等结构化道路领航辅助的技术要求相对低一些,但在这些场景中,由于车速较快,对路况信息的感知识别、应对速度、预判介入要求也较高。
据了解,诸如大曲率弯道、S型连续弯道等复杂道路就被看作是自动驾驶最为头疼的难点之一。相关业内人士表示,如果连续弯道没有处理好就会导致车辆乱串现象,而大曲率急弯处理不好则会影响车道保持、车速控制等功能,从而引发交通事故。
不过从MINIEYE发布的路测视频中,我们可以明显看出,该方案的表现并不逊色,且正如前文所说,该方案采用的是极简的1V5R传感器配置,计算平台算力仅有3TOPS。而从目前来看,市场上量产的高速领航辅助方案,算力普遍在10-30TOPS之间,最高甚至可达到100TOPS以上。
针对此,MINIEYE指出,市面上主流的研发路线,是采用大算力的计算平台和高阶传感器,开展算力军备赛。然而与之同样重要的是,如何在有限的硬件条件下充分发挥算力,将功能与体验开发到极致。这不仅能够降低成本、功耗,同时也是对于自动驾驶玩家技术实力的考验。
刘国清表示:“通过这一方案,我们希望能够为行业打开思路,实现L2++功能,不一定要去堆料,也可以通过技术上的持续优化迭代,用一种更高性价比的方式去实现。”
据其透露,MINIEYE低算力iPilot方案从设计之初就采用最小的硬件配置,包括传感器配置、传感器型号、芯片选型等,通过模型训练,针对芯片特点进行了专门的压缩与优化,在算力资源分配逻辑上,大幅降低能耗。算法优化层面,MINIEYE从高速领航功能典型工作场景入手,针对最基本的功能需求逐一设计解决方案。同时,基于MINIEYE在深度学习领域的积累,自研的自动驾驶算法模型能够快速实现平台移植,提升适配效率与运转效率。
正是得益于MINIEYE先进的算法模型技术,低算力iPilot方案能够高效利用算力资源,协同运行多传感器感知数据,在轻松应对复杂路况的同时,提升功能体验。
“坚持全栈自研,持续推动技术升级”
从低算力iPilot方案的开发过程中,我们不难看到,自研能力在其中所发挥的作用,事实上,这一方案由MINIEYE全栈自研。而之所以选择这一路线,原因并不难理解。
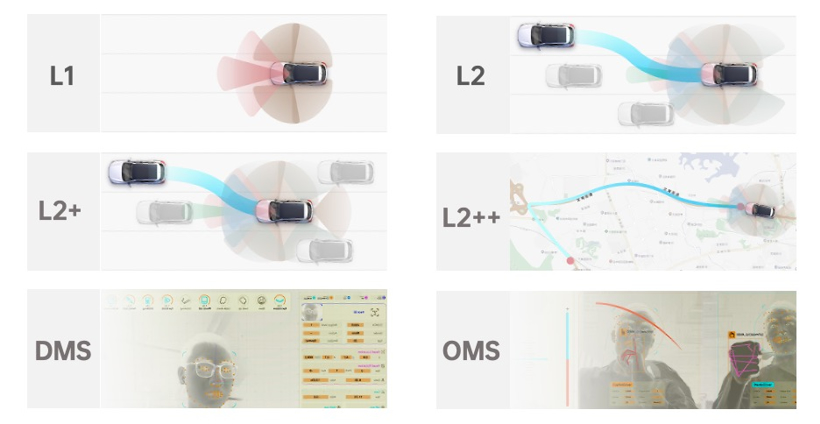
一方面,从技术层面来看,MINIEYE在技术开发层面可拥有更高的掌控度,有利于推动这一方案的持续迭代和升级。刘国清指出,如果在这一方案中,公司只做了感知,而后续的定位、规划或控制模块则需要依赖于其它企业,那就很难形成一个闭环,很难基于数据驱动去持续有效地迭代,让技术变得越来越聪明,“通过全栈自研,我们能够用更高的掌控度来实现这一点,这也是我们的技术能够从最开始的L0升级到L1、L2、L2+/L2++以及未来持续迭代到L3+的重要原因之一。”
MINIEYE产品持续迭代;图片来源:MINIEYE
另一方面,从业务层面来看,MINIEYE可借此拿到更多机会。“当我们具备全栈自研能力,我们可以根据不同车企的需求进行不同程度的交付。举例来说,面向一些相关技术积累较少的车企,我们可提供从前端感知到后端规控的整体解决方案,而当一些车企想要建立自己的核心技术,自己做其中的部分模块,例如后端的控制、规划等模块时,我们可向其交付前端的感知、融合、定位等模块,后端则由车企自研。当然鉴于我们在后端模块有很多积累,尽管这些模块并非由我们提供,我们也可以更好地了解他们的需求,与之进行沟通和协作。这可以帮我们拿到更多机会,更好地为行业赋能。”刘国清如此表示。
当然,按照MINIEYE的规划,未来其仍将以全栈自研的路线持续推动产品升级,不断丰富产品矩阵,更好地满足多元化市场需求。据盖世汽车了解,除前文提到的高配(7V5R2L)、中配(6V5R/7V5R)、低配(1V5R)iPilot解决方案外,MINIEYE还将推出行泊一体iPilot方案,该方案将在今年第三季度正式量产。
刘国清表示,随着智能驾驶功能装配率的提升,行泊一体化及舱泊一体化是必然趋势,MINIEYE希望能够基于其技术积累和量产经验,把相关解决方案打造地更加完备,适应更多场景,同时又兼具较高性价比,帮助客户以更低的成本实现升级,提升相关功能的装配率。
“不同定位的车型,有不同的需求,也一定有更适合它的配置。我们希望能够有比较丰富的产品线去比较好地满足不同定位、不同配置车型的需求。”刘国清最后补充道。
来源:盖世汽车
作者:Mina


.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
-1.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)







 [课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
[课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
