


 1579
1579
这期聚焦于角度维处理。
坦率的讲,上一期(加餐)天线布局设计指南1也算是角度维处理的重要一环,只不过侧重点在于天线布阵,分析在芯片收发通道有限的条件下,怎么通过合理的设计天线布局进一步伺候好角度维3个祖宗:测角范围,测角精度,测角分辨率。
光靠天线布局伺候当然不够,这期侧重从角度维算法来分析如何进一步提高雷达角度维处理能力。
我在之前的文章提过很多遍:角度维处理是毫米波雷达信号处理最让人操心的环节之一,原因在于,考虑到成本,硬件体积,功耗等各种因素,即使采用MIMO技术,我们获取的目标空间采样信息仍然十分有限,这是其一;其二,不同于速度维以及距离维,角度维空间采样的能量分布存在差异(天线设计因素),并且角度与估计频率是非线性关系。这就使得,毫米波雷达接收端获得较高的角度估计分辨率及精度,尤其是大FoV下的高角度估计分辨率及精度具有相当大的挑战。
这还只是角度维单目标的情形,如果角度维存在多目标(同速同距),则测角精度及测角分辨率问题将更加复杂一些,这是本期的重点,后文会详细分析。
在分析4D雷达角度维处理之前,我们先回到传统雷达,看看传统雷达如何应对角度维处理,由于距离多普勒来源于时间采样,而角度来自于空间采样,而在时间上形成高分辨比空间上形成高分辨要容易得多;另一方面,经典车载雷达处理链路为range-doppler-angle,所以一种典型思路是,通过合理的波形参数设计,使得环境目标在range-Doppler map上得到充分分离,这样留给角度维的压力是不是小很多。
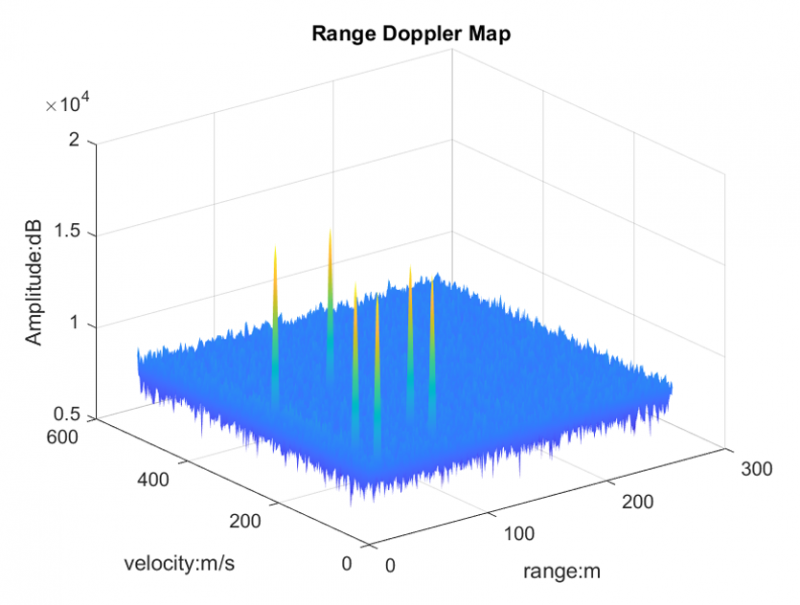
▲ Range-Doppler Map
一般而言,特别是在车辆行驶条件下,绝大部分目标已经在range-Doppler map上得到了分离,角度维通常只是输出一个目标,也就是同速同距不同角度的情况对于传统雷达而言比较少,即便有,很多时候也只是输出角度置信度高的一个。
这对4D雷达而言显然是不够的,不然那么多点云上哪来。
当然,4D雷达的距离以及速度分辨率会比传统雷达高一些,进一步增强其range-Doppler层面的目标分离能力。但是同时,同速同距不同角度的情况依然需要得到重视。我们知道,FFT是传统雷达角度维处理的经典算法,经久不衰,但是在角度维多目标问题上显得有些力不从心。
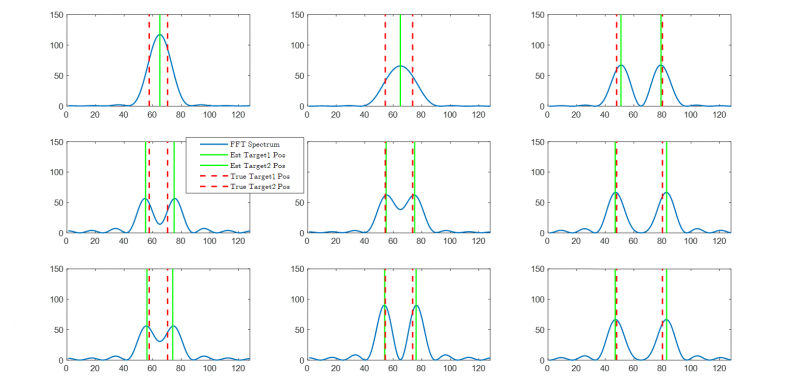
▲ 初始相位与目标角度对FFT算法影响
上图是表示不同初始相位,不同目标角度下的FFT谱,行代表相同角度不同相位,纵列代表相同相位,不同角度。我们以第1行为例,3张图左至右依次表示两个目标的角度不变,但是由于初始相位不同,目标分离状况完全不同;再看第1列,两个目标的初始相位不变,改变角度,两个目标的角度相隔逐渐增大,在FFT谱上确实得到了分离,但是角度估计值(绿线)与理想值(红虚线)存在偏差,也就是估计角度的精度恶化,这是由FFT谱结构中两个目标交叉项导致的。
小结下,如果同速同距下存在多目标,那么传统FFT算法将受到如下影响:
- 目标角度初始相位
- 多目标角度维FFT谱结构中的交叉项
这些问题会使得,即使多目标在角度维超过了瑞利限得到了充分分辨,其角度精度仍会存在恶化。
基于此,我们尝试给出一种基于FFT和超分辨算法的角度维混合处理架构。
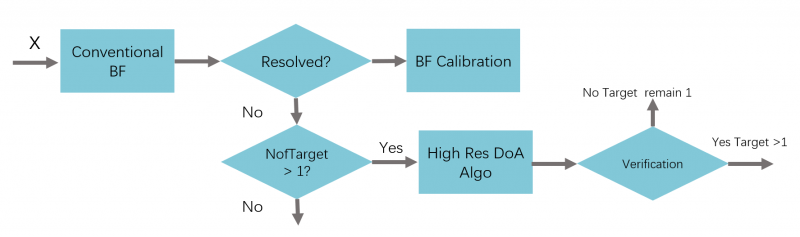
▲ 超分辨算法处理流程
如上图,我们可以对通道快拍数据先做CBF,如果目标得到了充分分离,那如前所述,我们需要多求解结果补偿以提高估计精度。如果没有分离(单峰值),那么有两种可能:
- 就是单目标,直接输出;
- 存在多目标,只不过由于初始相位,瑞利限等原因没有分离;
这个时候我们可以尝试用超分辨算法进行目标分离,如果可以分离,并且通过算法确认,则以超分辨算法的角度估计结果作为最终估计结果。
这套架构中超分辨算法以及补偿算法是技术核心,这期介绍下我们在超分辨算法上的主要工作。
超分辨算法本身也是博大精深,linear prediction, ESPRIT, MUSIC,ML等等,方法那么多,得看你怎么用,有几个点需要抓住:
像MUSIC为代表的subspace类算法高信噪比下确实效果不错,天线孔径依赖程度低,但是
- 依赖多快拍;
- 低信噪比条件下性能较差;
- 超分辨的伪谱与目标能量没有关联性;
- 一维搜索,不支持相干目标处理;
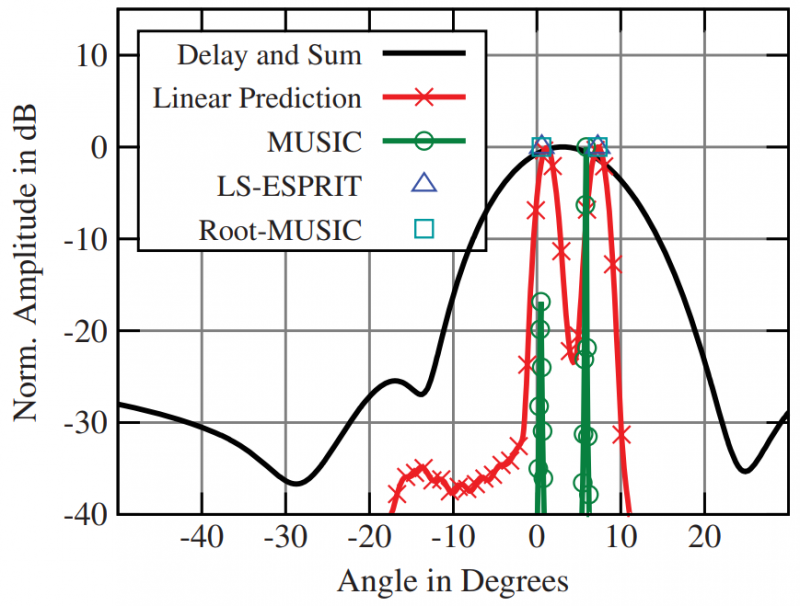
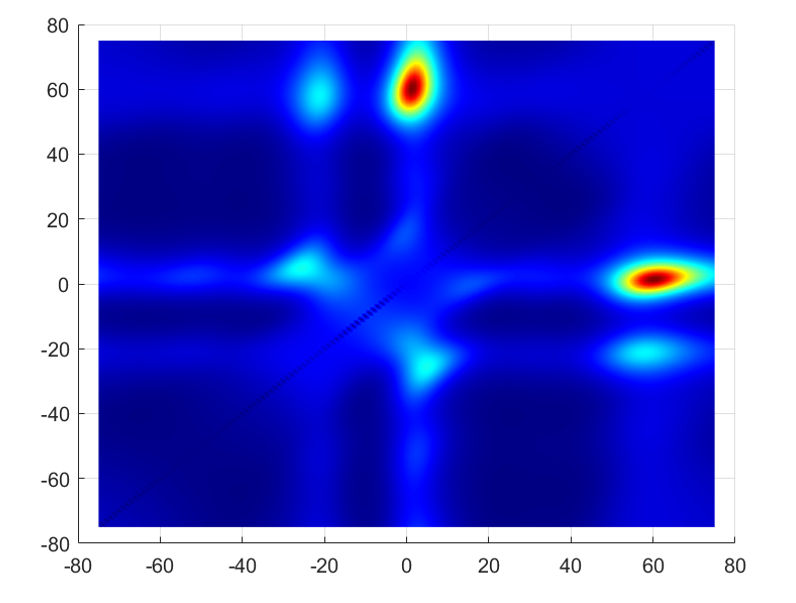
▲ 子空间类算法目标分离效果
如上图所示,MUSIC算法确实具有较好的目标分离能力,但是由于得到的是伪谱,只能获得目标的角度信息,无法获得目标的能量信息,比如上图中第一根绿线的能量比真实目标能量低了十几dB。
我们把眼光投向似然类算法,比如DML算法可以基于单快拍就可以求解角度,并且能够解决相干目标问题(多维度搜索),只不过计算较为复杂,比较耗时。
▲ DML谱(Two Targets)
我们通过优化DML的数学结构,通过合理的近似给出快速DML算法(Fast DML),能够保证算法估计精度的前提下,在嵌入式平台快速执行。如下图,传统CBF已经不能够解析两个目标峰值,因而只能输出一个目标(绿色实线),并且FFT输出角度还存在一定的精度损失;基于快速DML算法能够直接给出两个目标角度(-0.6872,0),并且保持高精度。
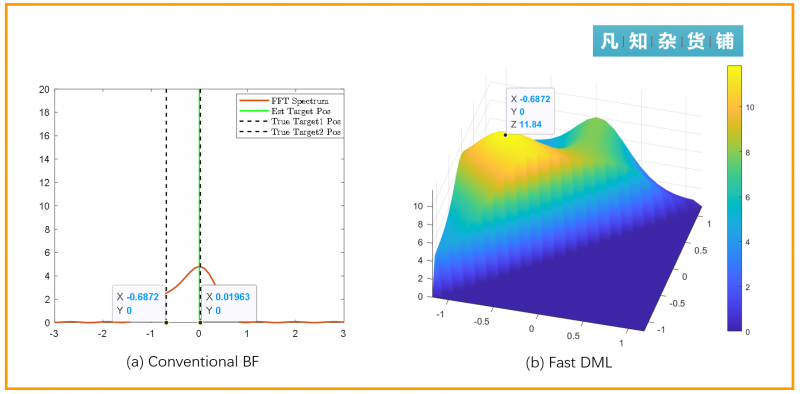
▲ CBF与Fast DML效果对比
小结
在测角算法选择上,我们希望算法主要关心的点是,精度,实时性,低信噪比下复杂场景下的测角鲁棒性。上述架构也是抛砖引玉,给出高效的,多目标高精度测角方案永远是值得研究的课题。
[参考文献]
[1] Fischer C , F Ruf, Bloecher H L , et al. Evaluation of different super-resolution techniques for automotive applications[C]// Radar Systems (Radar 2012), IET International Conference on. IET, 2013.
[2] Chamseddine M , Rambach J , O Wasenmüller, et al. GhostTarget Detection in 3D Radar Data using Point Cloud based Deep NeuralNetwork[C]// International Conference on Pattern Recognition (ICPR) 2020. 2020.

.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
-1.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)






.jpg?x-oss-process=image/resize,m_fill,w_128,h_96)
 [课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
[课程]STM32电机控制软件开发软件X-CUBE-MCSDK 6x介绍
