


 993
993
随着汽车电子技术的发展,车辆上配备了越来越多的电子装置,这些设备多采用点对点的方式通信,这也导致了车内存在庞大的线束。造成汽车制造和安装的困难并进一步降低汽车的配置空间。因此,汽车总线逐步开始向网络化方向发展。
在此背景下,CAN(Controller Area Network)总线应运而生,以其高可靠性和灵活性,成为汽车通信系统中不可或缺的一部分,承载着车辆控制、监控和诊断等关键任务。
一、技术演进:从CAN到CAN FD
随着技术的持续发展,传统的CAN总线在数据传输速率和带宽上逐渐显现出局限性。具体来说,传统的CAN总线波特率最大为1Mbit/s,数据帧中有效数据域最大为8个字节。
这种设计在早期满足了车辆控制和监控的需求,但随着车载系统复杂度的提升,对更高数据传输速率和更大数据容量的需求日益迫切。
因此,CAN FD(CAN with Flexible Data-Rate)随之推出。CAN FD在保持CAN优良特性的基础上,实现了技术上的重大突破:
1、可变数据位速率
CAN FD引入了数据段的波特率可变机制,理论上最高可达15Mbit/s,这一段的波特率可变,而其余部分仍使用原来的CAN速率,从而在保持兼容性的同时大幅提升了数据传输速率。
2、扩大的有效数据域
CAN FD将数据帧中有效数据域扩展到64个字节,相比传统CAN的8个字节,显著提高了单帧数据的传输量,使得通信更加灵活、快速、可靠。
3、新的CRC算法
为了适应更大的数据域和提高错误检测的准确性,CAN FD采用了新的CRC算法,并对填充位规则进行了优化,以减少错帧漏检率。
4、新的帧结构
CAN FD在控制场中增加了EDL位、BRS位和ESI位,这些位用于区分CAN报文与CAN FD报文,并确定是否转换为可变速率。同时,DLC编码方式也由线性变为阶梯式,以适应更大的数据长度。
二、ADTF:支持全面的CAN通信协议
ADTF(AUTOMOTIVE DATA & TIME-TRIGGERED FRAMEWORK)是一款汽车数据与时间触发框架,可用于开发车辆驾驶辅助系统。提供一系列功能和工具来支持车辆自动化和驾驶辅助系统的开发和测试。ADTF能用于快速原型设计、仿真、数据记录和验证(后处理)。
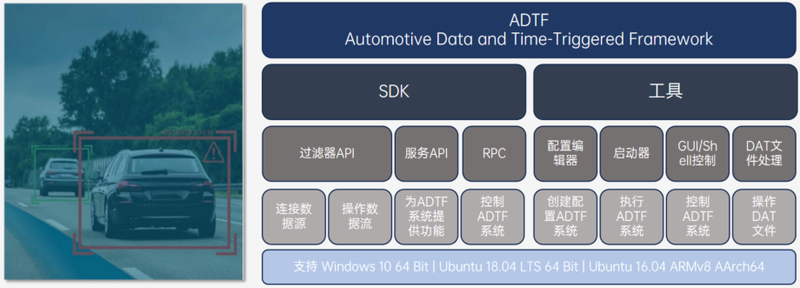
图1:ADTF框架
在总线方面,ADTF具备多个工具箱以支持其仿真与测试,比如ADTF Device Toolbox,ADTF Calibration Toolbox等。
在ADTF Device Toolbox中提供ARXML数据库文件总线解析,支持汽车总线(CAN 、CANFD 、 Flexray 、 以太网)、Vector®设备、信号处理和可视化等。
在ADTF Calibration Toolbox中支持通过多个过滤器与 ECU 进行 XCP 通信,以便通过 CAN 、 FlexRay 或以太网进行通信。
结合上述工具箱,ADTF可以在应用在以下领域:
1、汽车电子系统开发
ADTF广泛应用于汽车电子控制单元(ECU)的开发,包括发动机控制、底盘控制、车身电子等。
2、仿真和测试
在汽车电子系统的仿真和测试中,ADTF能够模拟总线通信,进行系统级和组件级的测试。
3、数据记录和分析
ADTF支持数据记录功能,可以捕获和存储总线上的数据,便于后续分析和故障诊断。
三、应用实践:ADTF的技术实现
ADTF的一个强项就是对总线数据的解析。比如对CANFD采集的数据,基于DBC配置进行解析和可视化呈现。如图2和3所示。


此外,ADTF支持AUTOSAR架构下ARXML CANFD数据的解析。如图4和图5所示的ARXML CANFD数据解析工程。


ADTF软件以其强大的功能、高度的灵活性和专业的技术支持,成为汽车电子开发领域的重要工具。无论是在产品开发、系统集成还是测试验证阶段,ADTF都能提供有效的解决方案,加速汽车电子系统的开发进程。

 下载ECAD模型
下载ECAD模型



