


















 7617
7617

舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。常应用于各种航模、车模、玩具无人机当中。起初常被应用于各种航模、车模、玩具当中。它的特点是控制简单,成本低,体积小扭力大;随着舵机生产技术的进步,目前在航空航天、大型无人机,机器人、医疗,工业自动化等领域都开始应用;同时舵机的种类也越来越多。面对不同行业的不同需求侧重点,怎么去高效快速的选到自己合适的舵机就成了一个大家比较关注的问题了。接下来就以德晟的规格书为例,为大家梳理一下舵机的几个技术指标:
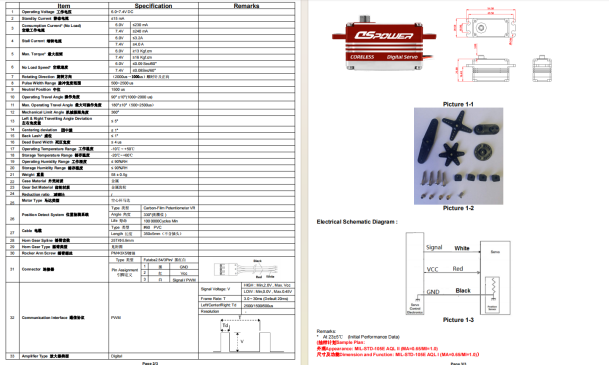
舵机的规格主要有以下几个方面:扭矩、工作角度、速度、通讯协议、工作电压、外壳及齿轮材质、尺寸、马达类型、配件等。我们在做舵机的选型时要对以上几个方面进行综合考虑。
扭矩
舵机扭矩的单位是kgf.cm,这是一个扭矩单位。可以理解为在舵盘上距舵机轴心水平距离1CM处,舵机能够带动的物体重量。常分为额定扭矩和堵转扭矩。额定扭矩是指舵机在正常工作环境下能够持续输出的的扭矩,选型时一般参照舵机的额定扭矩来选型;堵转扭矩是指舵机在输出轴被阻止无法旋转时施加的最大扭矩,堵转扭矩越大,舵机在承受外部负载时的能力就越强。
牛米换算:1NM=9.8/kgf·cm。
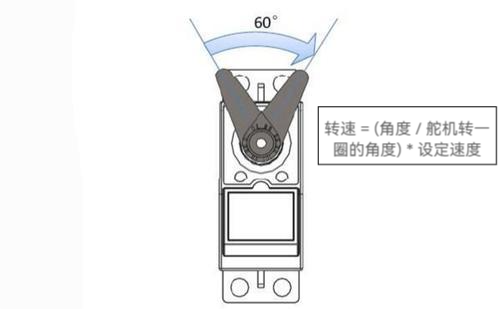
转速:
转速由舵机无负载的情况下转过60°角所需时间来衡量,主要受马达类型、电压、齿轮箱减速比等因素影响。
控制角度(位置传感器类型):
控制角度:常规180°,360°角度可控,N*360多圈角度控制
位置传感器:0-320°内可用电位器实现,360°角度及多圈空中磁编码器多,也有霍尔。
电位器因其是接触式,有磨损,用于寿命要求不太高,长寿命精度要求不高的工况。
磁编码器为无接触式,用于寿命长,性能稳定,长寿命精度要求高的工况。
电压:
舵机的速度、转矩数据等性能参数和电压有关,在6V和7.4V两种测试电压下这两个参数有比较大的差别。如DS-H003:

舵机的工作电压对性能有显著影响。一般来说,小型舵机由于工作设备原因,工作电压通常为4.8V、6V和7.4V,而一些工业设备上的舵机则在7.4V以上,例如12V、24V的舵机。在舵机的电压范围内,较高的电压能提升电机的速度和扭矩。在选择舵机时,还需要考虑舵机的堵转电流是否在主控板承受范围内,过高的电流会导致主控板过热烧毁。
马达类型:
电机作为舵机的动力源头,同样也大致分为铁芯有刷、空心杯、无刷等四种马达,电机性能直接关乎着舵机的扭矩和转速。其中以无刷电机为最,转速更高、扭矩更大,大扭力舵机一般直接上无刷;铁芯电机以性价比优势在市场上占据一席之地;而空心杯则以体积小、散热快优势在小型应用市场上备受青睐,性能介于两者之间。
外壳及齿轮材质:
这里的材质主要是指舵机外壳和齿轮箱。
舵机外壳大致分为塑胶外壳、半铝框和全金属外壳。塑胶材质重量更轻,成本更低,金属材质散热好,美观,金属外壳防水性也更好。
齿轮则分为塑胶齿轮和金属齿轮两种。塑胶齿声音小、成本低,金属齿则负载能力、抗冲击性、寿命更好。
塑料齿轮的舵机在堵转情况下可能会崩齿,金属齿轮的舵机则可能会电机过热损毁。所以材质的选择并没有绝对的倾向,关键是将舵机使用在设计规格之内。
尺寸、重量:
尺寸和重量是舵机选型中的两个关键参数。尺寸直接影响舵机的安装空间,而重量则影响设备的整体稳定性和承载能力。在选择舵机时,应根据设备的具体需求和安装条件,合理评估尺寸和重量,以确保舵机能够适配设备并满足性能要求。

通讯协议:
舵机在实际应用中需要与控制卡或其他设备进行通信,因此,选择与设备通信相匹配的舵机同样也很重要。目前市面上常见的舵机使用的通信协议有四种,分别是:①PWM(电位器引线可做位置反馈,容易受干扰,不建议);②TTL(多用于STEAM教育,机械臂编程上,相对于其他总线回读稍慢)、③RS485(RS422等)、④CAN总线、⑤PLC控制。除了PWM,其余都是总线类型,可以实现串联控制,实时反馈和调整
配件:
为舵机选择合适的配件同样重要,例如,舵机的摇臂、舵盘等。这些配件的选择要根据舵机的具体使用要求进行匹配。厂家会在买舵机的同时赠送标准配件包,但是无论是塑胶或者是金属的,厂家都是支持定做的。同时考虑到适配性和紧密度,塑胶链接件开模可以让舵机厂家提供镶件;金属连接件的话也可以提供输出齿图纸,做出来适配性会更好
综上所述,舵机的选型涉及多个方面的参数,包括扭矩、工作角度、速度、通讯协议、工作电压、外壳及齿轮材质、尺寸、马达类型、配件等。在实际应用中,我们需要根据设备的需求和运行条件,对这些参数进行综合考虑,以选出最适合的舵机。此外,在选购舵机时,还需注意厂商提供的技术参数和性能指标,以确保选购到符合要求的舵机。



