此方案以新唐M0518系列实作六爪机器人,可结合教学、科学研究、娱乐以及各类竞赛等用途。此款六爪机器人共有六根爪子,每根爪子有3个关节,共有18个自由度,可以完成前进、后退、左右移动、转弯、跳舞等等各式各样的动作。前方还拥有一具夹持器,可以进行张合、夹持物品的功能。
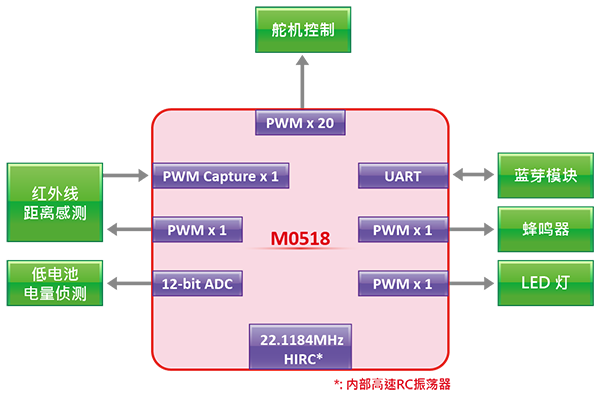
此方案使用20路PWM控制伺服马达。其中18路PWM用于控制机器人的6根爪子,每根爪子具有3个伺服马达。调整PWM输出的占空比,我们可以控制伺服马达转动的角度,就能够操作机器人做出各种的动作。另外2路PWM用于控制机器人前方的夹持器,可以操作夹持器的张合。
M0518总共具有24路PWM,在机器人的动作控制上使用了20路PWM,还有4路PWM可以实现其他功能。其中的2路PWM用于发送以及捕捉红外线讯号,以PWM仿真IrDA编码输出,并以另外一组PWM捕捉输入。当前方具有障碍物,障碍物会反射红外线讯号,再确认接收的讯号是否与发出的编码相同,就可以探查前方是否具有障碍物,如果有障碍物就令机器人后退,避免撞上。
另外2路PWM用来控制LED以及蜂鸣器。藉由控制PWM的占空比调整LED的亮度;调整PWM的输出频率,也可以调整蜂鸣器的音频,发出不同频率的声音。
此方案具有电池电量侦测的功能,藉由ADC转换电池电压,能够做到电池的电量侦测。当ADC侦测的电压值低于设立的界线,就让蜂鸣器响起,提醒操作者电池电量过低。
机器人的通讯方面,使用UART连接蓝芽模块。利用撰写好的手机APP,当完成蓝芽配对后,就能够透过智慧手机或者平板,操作六爪机器人。



 发表于 2016-8-2 09:05:28
发表于 2016-8-2 09:05:28
 /4
/4 
