TA的每日心情 | 奋斗
2016-11-11 16:09 |
|---|
签到天数: 287 天 连续签到: 1 天 [LV.8]以坛为家I
|
程序:
#include <SoftwareSerial.h>
// define some constants
int ActPos = A0; // select the input pin for feedback signal
int DesPos = A1; // select the input pin for control signal
byte PWMOutput;
long Error[10];
long Accumulator;
long PID;
int PTerm;
int ITerm;
int DTerm;
byte Divider;
/*
The FIRSTBOT has a PIC16F1829 controller that controls the
two MC33926 H-bridges on the board. A oftware serial interface
is used to control that part.
*/
SoftwareSerial mySerial(2, 3); // Receive data on 2, send data on 3
byte SerialTXBuffer[5];
byte SerialRXBuffer[5];
void setup()
{
// Open serial communications and wait for port to open:
Serial.begin(9600);
mySerial.begin(9600);
}
/* GetError():
Read the analog values, shift the Error array down
one spot, and load the new error value into the
top of array.
*/
void GetError(void)
{
byte i = 0;
// read analogs
word ActualPosition = analogRead(ActPos);
// comment out to speed up PID loop
// Serial.print("ActPos= ");
// Serial.println(ActualPosition,DEC);
word DesiredPosition = analogRead(DesPos);
// comment out to speed up PID loop
// Serial.print("DesPos= ");
// Serial.println(DesiredPosition,DEC);
// shift error values
for(i=0;i<10;i++)
Error[i+1] = Error;
// load new error into top array spot
Error[0] = (long)DesiredPosition-(long)ActualPosition;
// comment out to speed up PID loop
// Serial.print("Error= ");
// Serial.println(Error[0],DEC);
}
/* CalculatePID():
Error[0] is used for latest error, Error[9] with the DTERM
*/
void CalculatePID(void)
{
// Set constants here
PTerm = 2000;
ITerm = 25;
DTerm = 0;
Divider = 10;
// Calculate the PID
PID = Error[0]*PTerm; // start with proportional gain
Accumulator += Error[0]; // accumulator is sum of errors
PID += ITerm*Accumulator; // add integral gain and error accumulation
PID += DTerm*(Error[0]-Error[9]); // differential gain comes next
PID = PID>>Divider; // scale PID down with divider
// comment out to speed up PID loop
//Serial.print("PID= ");
// Serial.println(PID,DEC);
// limit the PID to the resolution we have for the PWM variable
if(PID>=127)
PID = 127;
if(PID<=-126)
PID = -126;
//PWM output should be between 1 and 254 so we add to the PID
PWMOutput = PID + 127;
// comment out to speed up PID loop
// Serial.print("PWMOutput= ");
// Serial.println(PWMOutput,DEC);
}
/* WriteRegister():
Writes a single byte to the PIC16F1829,
"Value" to the register pointed at by "Index".
Returns the response
*/
byte WriteRegister(byte Index, byte Value)
{
byte i = 0;
byte checksum = 0;
byte ack = 0;
SerialTXBuffer[0] = 210;
SerialTXBuffer[1] = 1;
SerialTXBuffer[2] = 3;
SerialTXBuffer[3] = Index;
SerialTXBuffer[4] = Value;
for (i=0;i<6;i++)
{
if (i!=5)
{
mySerial.write(SerialTXBuffer);
checksum += SerialTXBuffer;
}
else
mySerial.write(checksum);
}
delay(5);
if (mySerial.available())
ack = mySerial.read();
return ack;
}
void loop() // run over and over
{
GetError(); // Get position error
CalculatePID(); // Calculate the PID output from the error
WriteRegister(9,PWMOutput); // Set motor speed
}
接线图:
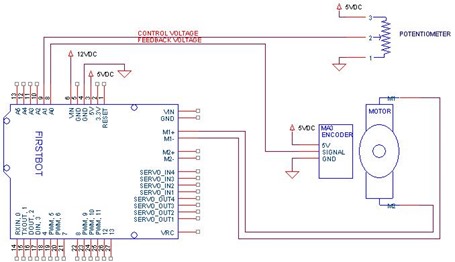
集成arduino的电机驱动板RIRSTBOT的原理图详见如下。
|
|


 发表于 2013-12-27 14:29:00
发表于 2013-12-27 14:29:00

 发表于 2013-12-27 18:32:46
发表于 2013-12-27 18:32:46
 楼主
楼主 /2
/2 

