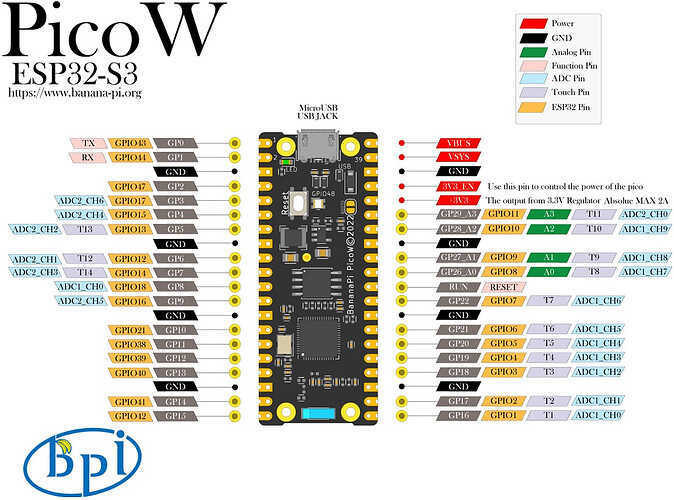
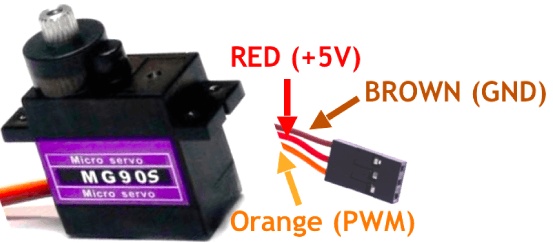
 BPI-Pico-S3 与 Raspberry Pi Pico 板尺寸相同,搭载ESP32S3芯片,8M flash,4层PCB,电镀半孔工艺,陶瓷天线,支持 2.4 GHz Wi-Fi 和 Bluetooth® LE 双模无线通信,是一款专为物联网开发和Maker DIY设计的开发板。 出厂内置 tinyUF2 + CircuitPython,推荐使用Mu编辑器上手CircuitPython开发。 BiliBili视频 硬件接口示意图PWM控制舵机以MG90S舵机为例,其他各种舵机参考其对应的使用手册,在以下代码中修改相应的参数。 设y为占空时长,x为旋转角度
y=(2500-500)/180*x+500
y=(100*x+4500)/9设y为占空比,x为旋转角度
y=((50-10)/180*x+10)/100*65535
y=(4369*x+196605)/30BPI-PicoW-S3的VBUS引脚可输出+5V;除GP0以外,所有GP引脚都可以用于输出PWM,仅需在程序中修改到对应引脚即可。
MG90S BPI-PicoW-S3
GND 棕色GND
+5V 红色VBUS
PWM 橙色GP0import board
import pwmio
import time
servo_1 = pwmio.PWMOut(board.GP0, frequency=200, duty_cycle=0)#200hz, one cycle 5000us
def get_duty_cycle(x):
return int((4369*x+196605)/30)
servo_1.duty_cycle = get_duty_cycle(90)# 90 degreesimport board
import pwmio
import time
servo_1 = pwmio.PWMOut(board.GP0, frequency=200, duty_cycle=0)#200hz, one cycle 5000us
def get_duty_cycle(x):
return int((4369*x+196605)/30)
action_list1 = [0,45,90,135,180,0,180,45,135,90]
while True:
for i in action_list1:
servo_1.duty_cycle = get_duty_cycle(i)
time.sleep(0.5)购买BPI-PicoW-S3:
| 

 发表于 2022-11-14 09:22:00
发表于 2022-11-14 09:22:00
 /3
/3 

