视频观看:http://www.youku.com/playlist_show/id_5221723.html


伺服机器手臂,顾名思义,是由六个伺服电机驱动的机器手臂。既然是手臂,那么就有几个关节,大家可以联想到,我们人类的手臂,除了肩、肘、腕这三个关节外,再加上手指的关节,就有很多个关节了。那么我们这个机器手臂也是一样,用6个伺服电机实现了一个手的简单结构,除了没有人那么多的关节外,还缺少一些神经组织和神经系统,然而,具有“灵巧手”(可完成复杂装配、搬运或仿人手抓取鸡蛋)的“仿人形”机器人乃机器人研究的前沿。
而我们的6个伺服机器,以巧妙的机械结构,结合它的控制系统,展示了6自由度机器手动作的控制原理。它采用3个13kg扭力的金属齿轮、一个3.2kg、两个2.3kg的伺服和一些精密的铝合金加工组件组合而成。目前,我公司的机器手臂以390mm长度的为主,使用32路控制器来控制机器手臂的运行动作,本控制器采用atmega168 MCU,和电脑RS232串口通讯,可同时控制32颗伺服电机,双电源供电(6~12V单片机供电,4.8~6V伺服电机供电[伺服电机供电分别设有1-16路和17-32路供电端口]),同时还设有wi-fi无线控制模块,预留ISP下载口,用STK500 ISP下载线便可以下载MCU控制程序。
 
特性:
--铝合金结构的完美组合;
--ATMEGA 168实现32路控制;
--可视化上位机操作界面,让你的视觉更直观;
--支持简易指令控制,实现机器手臂的连贯动作;
--控制器预留了ISP下载口,用STK500 ISP下载线便可以对控制
板上的单片机进行编程;
--设有wi-fi无线控制模块扩展口,供更高需求的客户使用;
--超强金属质感,以及铝件防刮花工艺。
『配置说明』
工作电压:【 1~16】路电机电源输入电压4.8~6V
【17~32】路电机电源输入电压4.8~6V
单片机供电电压6V~12V
工作电流:伺服电机电源电流输入2~3A【PS-303D电源型号最佳】
自由度 :6
控制芯片: ATMEGA 168
最大举力:200G (6V,3A运行环境)
最大伺服:13KG (4颗)
中型伺服:1.8KG (2颗)
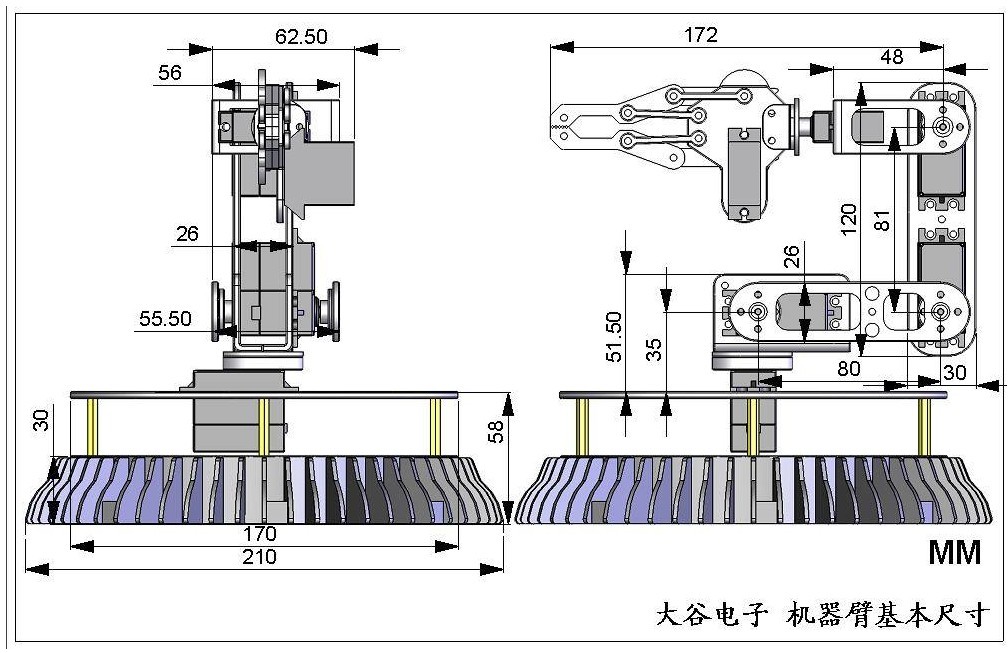
手臂长度:390mm
6自由度机器手臂基本尺寸图(请复制以下链接到IE查看):http://www.arexx.com.cn/UploadFiles/20081115135927235.jpg
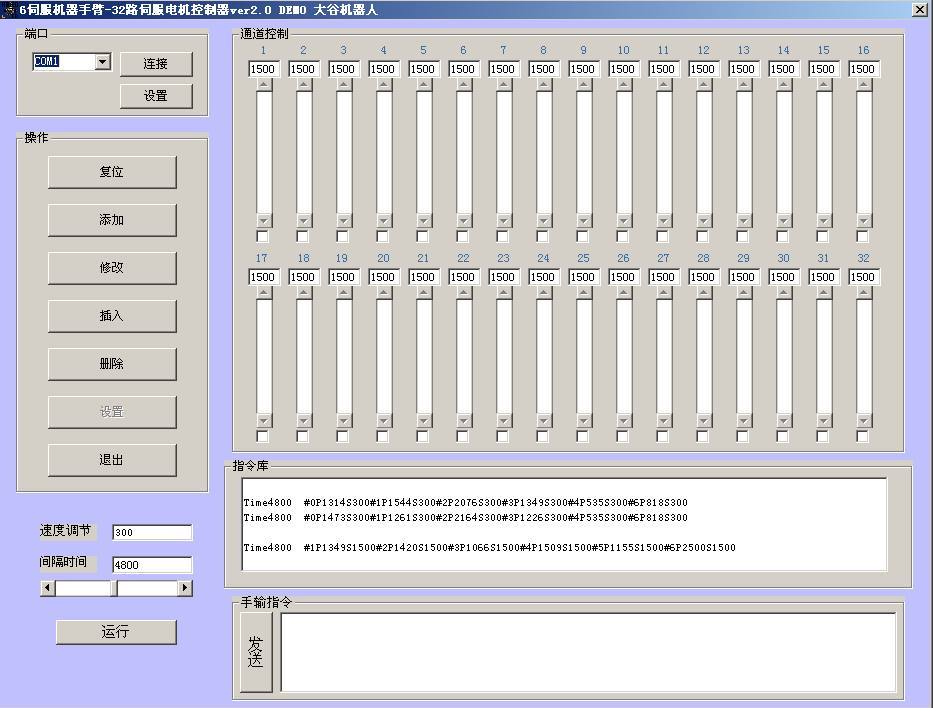
以下是32路伺服电机控制系统界面:
1、如图所示:从上往下看,电路板正面有三个电源输入口,中间的为单片机的电源输入。使用了7805将电压稳定在5V。因此输入的电压在6V到12V之间即可。两侧分别供应16路伺服电电机的。输入电压在4.8V~6V之间。
2、伺服电机插针为32排,每排3针。如图上蓝色字体所标志,最外侧的针是地,中间是电源,最内侧是信号针(接伺服电机上的白色或橙色线)。
3、中间的跳线是设置波特率的,两个跳线都插上,代表了的值是11,波特率是115.2k。若要设置其他波特绿请参考图2所示。(上位机软件默认的设置是115.2K。)
这套机器手臂,无论是robot fans做个人开发还是学生参赛,都是机器人爱好的合适的教育平台。
1,32路伺服电机控制器,操作说明书(请复制以下链接到IE查看,淘宝不支持外部链接):
2,RP6扩展机器手臂说明书介绍:
6V3A大谷6自由度机器手臂标配电源,真正的6V3A

6V3A大谷6自由度机器手臂标配电源,真正的6V3A(此电源内芯为正极,外芯为负极,电压、电流不可调,无短路保护,切记不可短路,短路会烧坏电源)
大谷教育机器人
淘宝旺铺:http://robotics1.taobao.com
机器人视频观看:http://u.youku.com/robotics1
旺旺:robotics1
在线客服Q_Q:1401706924
机器人技术交流学习Q_Q群:7850104
全方位的机器人配件 打造属于自己的机器人 智慧创造价值,创新成就未来! | 

 发表于 2012-8-17 21:44:06
发表于 2012-8-17 21:44:06





 /1
/1 

