1. 引言
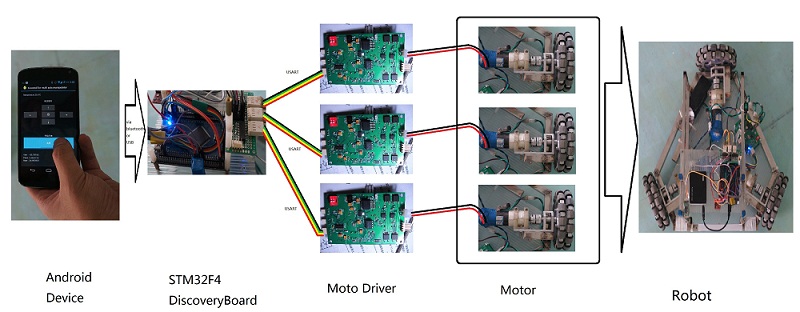
智能手机平台与STM32F4的通信可以有多种方式,本方案选用STM32F4平台进行Android设备的外部扩展,两平台间使用USB接口或蓝牙接口进行通讯。STM32平台可以实现自主视觉追踪,同时通过通信接收Android设备发来的指令,实现人机交互。 2. 系统指标针对当前智能监控系统的发展状况,本系统需要实现的系统指标如下表所示: 表1 系统指标 3. 系统方案3.1系统简介 整个系统分为运动平台和视觉追踪平台两部分。运动平台主要由Android设备、扩展板和执行机构构成,执行机构可以是很多种类的运动平台,本项目中是由电机驱动、电机、机架组成的全向移动平台。视觉追踪部分由摄像头、主控板和LCD构成。运动平台中的扩展板与视觉追踪部分的主控板均由同一块STM32F4 Discovery来实现。一种可实现的具体系统架构如图1、图2所示。它们的功能如下: 图1 视觉跟踪系统 图2 运动机构组成 l 主控板:扩展板是一块以STM32F407VGT6为主控的核心控制板。其上有1路USB Host接口用以连接Android设备,3路USART接口以实现和电机驱动器的通信。扩展板的软件基于ST官方提供的USBH ADK类库,以USBHost方式与手机进行通讯。 l 摄像头:摄像头设备为视觉输入传感器,本平台选用OV7725和MT9M111两种CMOS传感器作为视觉输入设备,其中,OV7725能提供VGA分辨率60fps输出,而MT9M111能提供1280*960分辨率,15fps输出,且在色彩上更好一些,对于本次应用,两种平台均能成功实现。 l l Android设备:Android设备是一个运行有Android系统的硬件平台,最常见的为Android智能手机。它的作用是提供一个用户交互界面,采集自身传感器信息,将用户意图转化为信号量,并提供提示界面和拟物化的操作面板。在本项目中,Android手机负责收集自身的加速度计、陀螺仪、电子罗盘的信息,通过DCM互补滤波以及四元数矩阵融合转化成为Yaw,Pitch,Roll三个姿态角。通过人操纵手机改变手机的姿态,从而代替手柄的功能。同时,屏幕上放置按钮控件以实现抓取、放开等机械臂动作的控制。 l 电机驱动:电机驱动是一块基于STM32F103CBT6的控制板,通过USART接口与上位机通讯获得指令(目标速度、目标位置等),生成不同占空比的PWM波驱动一个H全桥。同时,电机上的编码器接回电机驱动板,以实现速度的闭环控制。 l 电机:电机是直接执行机构,本项目中使用有刷直流电机,电机自带两相正交旋转编码器,可以实现速度的大小和方向的测量。电机以及其安装的机架构成了3自由度机械臂执行机构,可以实现弯曲、伸展、转向等动作。
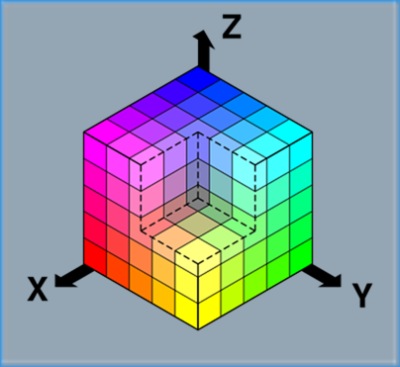
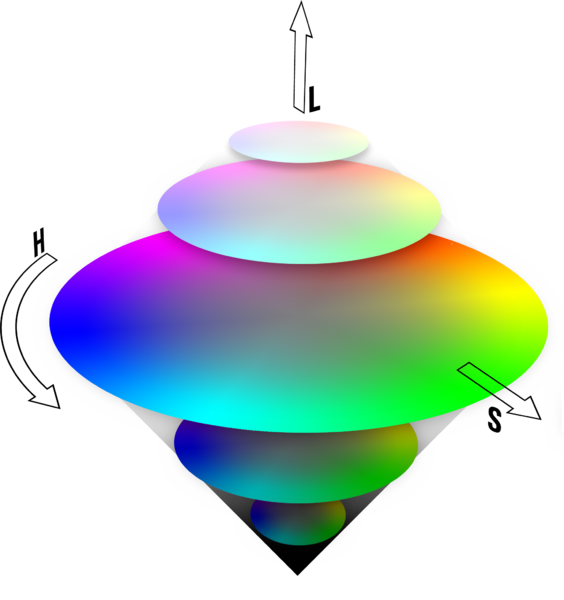
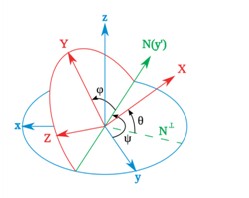
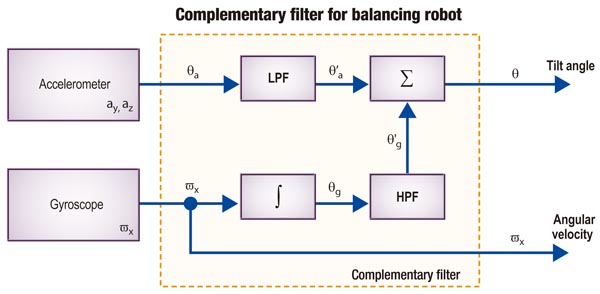
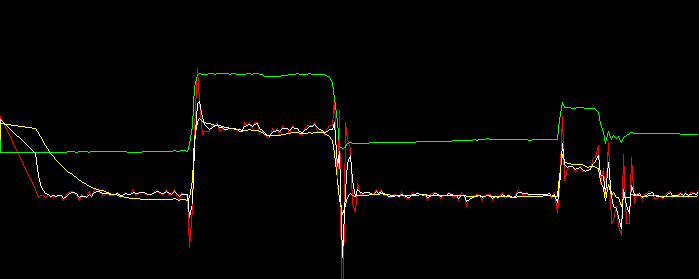
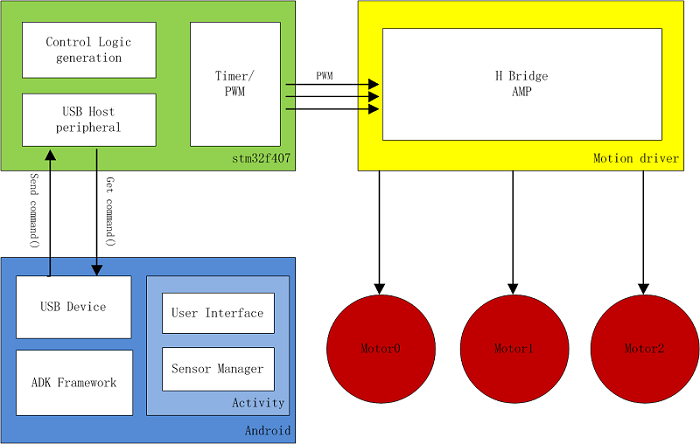
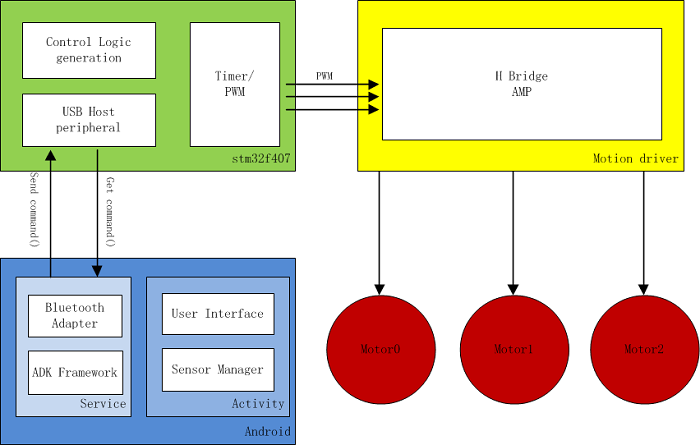
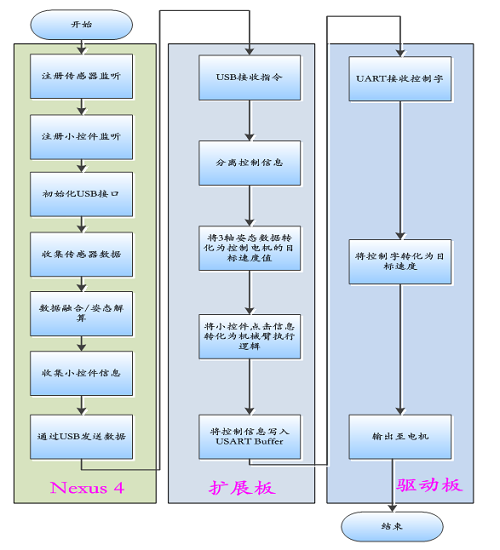
3.2系统算法分析 3.2.1 视觉算法 本项目旨在进行于Cortex-M4平台上的视觉处理实时算法的可行性实验,鉴于此平台较好的运算性能,可以实现一些实时性较高的新型算法。本实力实现的是HSL色域shift算法进行的特征匹配与标记,最终实现对特定色调色块的定位,从而实现追踪。在目标色调提取时,通过统计中央1/2区域的HUE直方图来获得。当光线变化或者移动太快造成目标失锁,程序可以根据直方图的数据进行参数调整,从而提高了追踪算法的鲁棒性。得益于STM32F4不错的性能,本算法在ROI内搜索开销仅有1ms左右,全图搜索也仅需15ms,完全可以在帧传输间隙完成搜索。 图3 RGB与HSL色彩空间 3.2.2 手机端姿态解算 嵌入式的算法开发需要在算法的性能和实现复杂度之间进行折中。对于多传感器姿态融合目前一般有三种方法:欧拉法、方向余弦法和四元数法,其中,欧拉法通过直接求解欧拉角,方法较为直观,但方程会出现奇点,故不能全姿态工作;方向余弦法没有退化问题,但要求解9个微分方程,计算量太大;四元数法也没有方程退化问题,且计算量较小,因此较适合本项目的运用。四元数示意如图4所示。 图4 四元数示意图 本项目多传感器融合使用DCM互补滤波。互补滤波算法相较EKF卡尔曼滤波而言计算量较小,且在弱耦合情况下DCM的效果也很好,故采用互补滤波。算法流程如图5所示。 图5 互补滤波示意图 在实际使用中,可以看出陀螺仪与加速计具有较为互补的传感器特性。加速度计具有长期稳定特性但响应速度慢,而陀螺仪实时性很好,却因为零漂、温漂、非线性等的存在而会积分出累积误差,自身无法消除。从数据看来,融合之前加速计曲线在震动之下稳定性很差,而陀螺仪曲线不受影响,所以在互补滤波中陀螺仪的融合权重较高,而使用加速计进行长期融合修正陀螺仪的累积误差。如图6所示,红色和黄色分别为融合前加速计、陀螺仪获得的角度曲线,绿色为融合后的角度曲线(Pitch)。 图6 融合前后的传感器曲线 4. 系统硬件设计本系统最终要实现传感器的采集、姿态的结算、控制逻辑的生成和控制等任务,为了缩减开发周期,使用比较常见的LG Nexus 4手机作为Android平台,扩展板使用意法官方的低成本评估板STM32F4 Discovery。 下图7给出了使用到的模块的简化原理图(USB连接),图8为通过蓝牙连接的简化原理图,主要区别在于,蓝牙服务模块存在于一个Service当中,当手机关闭屏幕、回到主界面或是切换至其他进程时,在后台运行的Service可以保证蓝牙服务不断线。各个模块的详细介绍如下: 图7 模块简化原理图 图8 蓝牙版简化原理图 l Android设备:此为LG Nexus 4手机,配备1.5Ghz Qualcomm Snapdragon APQ8064 四核处理器,Adreno320图形显示处理器,2GB LPDDR3 RAM l STM32F407:此为STM32F407VGT6 主控芯片,基于ARM Cortex-M4架构,168Mhz主频,具备完备的通信接口与连接能力,集成32位浮点运算单元和单周期多指令执行器,可以完成一些较复杂的控制逻辑和算法 5. 系统软件设计在本系统中,软件设计分为三个部分,第一部分为Android软件设计,第二部分为扩展板软件设计,第三部分为驱动板软件设计。Android设备程序为实现一个Activity类,在这个类中构造了读取传感器、姿态解算、读取按钮状态、发送指令、刷新UI等方法。在扩展板软件设计中,主要为USBH类的实现和消息读取,转化为电机目标速度。在电机驱动板程序中,主要实现了UART读取、PWM生成、正交编码器读取等函数。简要的软件流程如图9所示。蓝牙连接的流程图和图9基本一致,只是将USB发送和接收数据部分替换为蓝牙方式。 图9 系统软件总体架构图 6. 系统关键设计与创新1) 多传感器融合姿态解算 本系统利用Android 手机实现了自身姿态的解算,其算法实现的准确性、实时性均达到了很好的程度。其中,姿态更新速率达到了200Hz,甚至超越了一些工业应用的惯性测量器件的指标。欧拉角的精度达到了0.5°-1.0°,可以满足很大一部分测量的精度需求 2) 灵活且低成本的控制/测量平台 本系统和传统的工业应用控制器/收集器的区别在于,我们使用了一个以Android系统为基础的软件平台。这样,用户界面、数据分析、报表显示等功能便可以以一种非常灵活的方式实现,且实现不同用途所做的修改也十分简单,具有非常好的兼容性。同时,高集成度的手机平台带来了平台的低成本。 3) 强大的扩展能力 本系统采用通讯能力极强的STM32F4平台作为Android平台的扩展,其完备的通信接口为外接更多外设提供了非常大的方便。且由于STM32系列芯片的易用性,扩展接口变得十分简单。 7. 评测与结论7.1系统测试 姿态检测平台,对测量结果做了详尽测试,结果如下
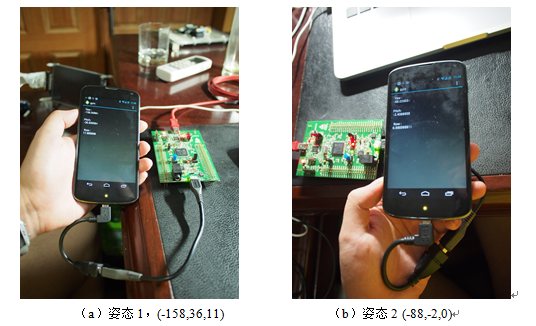
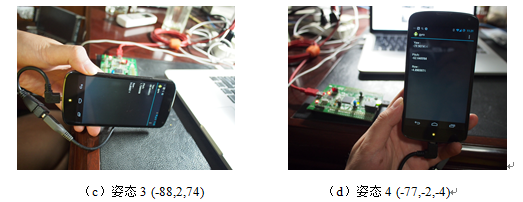
图9 姿态检测测试结果 从上图可以看到,手机的Yaw,Pitch,Roll数据较好的反应了自身的实际姿态,可以达到姿态采集的目的。 手机与扩展板通信,也进行了通信验证,结果如下: 按下Discovery板上的蓝色按键,手机上显示控件亮起 按下手机上的Toggle Button控件,Discovery板上的红色LED亮起
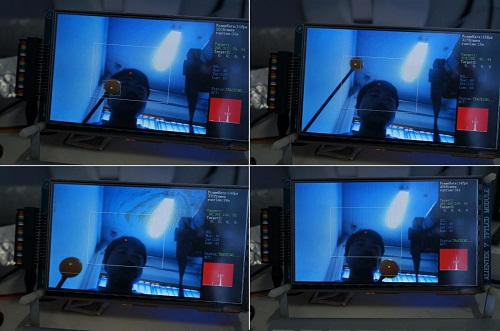
图10 视觉追踪实验 7.2 应用实例 实际应用时,通过这一套姿态检测控制平台控制一个全向轮机器人,使其在移动平面内能受控进行三个自由度的运动(前进后退、左右平移、自转)。控制界面如图11所示:
图11 软件控制界面
下面7幅照片演示了如何使用这一平台控制一个全向移动机器人。 图12 开启姿态检测控制
图13 前进
图16 右移
7.3总结 本系统利用Android系统平台和STM32F4平台搭建了一个多轴控制器和用户交互平台。该系统利用了具备低成本、灵活定制、性能较好等特点,且充分利用了不同硬件平台、软件平台的优势,扩展能力很强,后期可以进行更多外部传感器的扩展以及更加复杂的控制逻辑的实现。
| 


 发表于 2020-9-16 16:42:59
发表于 2020-9-16 16:42:59








 /3
/3 
