|
快充QC的基本电源结构采用反激Flyback+副边(次级)同步整流SSR,对于反激变换器,根据反馈取样的的方式,可以分为:原边(初级)调节和副边(次级)调节;根据PWM控制器所在的位置,可以分为:原边(初级)控制和副边(次级)控制。 1、原边(初级)调节和副边(次级)调节 输出电压的稳定需要反馈环节,将其变化的信息送给PWM主控制器,从而对输入电压、输出负载的变化实现调节。根据反馈取样方式的不同,可分为原边(初级)调节和副边(次级)调节,如图1和图2所示。
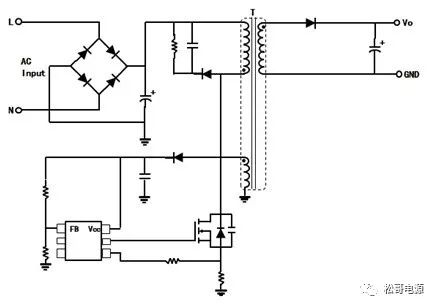 图1:原边(初级)调节 图1:原边(初级)调节
 图2:副边(次级)调节 图2:副边(次级)调节原边(初级)调节的反馈信号不是直接取自于输出电压,而是取自于和输出电压保持一定比例关系的辅助绕组或原边初级主绕组,其特点为: ①、间接反馈方式,负载调整率差,精度差;
②、简单,成本低;
③、不需要隔离光耦。 副边(次级)调节的反馈信号使用光耦和TL431直接取自于输出电压,其特点为: ①、直接反馈方式,负载调整率、线性调整率好,精度高;
②、调节电路复杂,成本高;
③、需要隔离光耦,光耦随时间有老化问题。 2、副边(次级)二极管整流和MOSFET同步整流SSR 反激变换器的副边(次级)通常使用二极管整流,由于快充的输出电流大,特别是直充或闪充,输出电流高达5A,为了提高效率,使用MOSFET取代二极管作为整流管,称为副边(次级)同步整流SSR,如图3和图4所示。
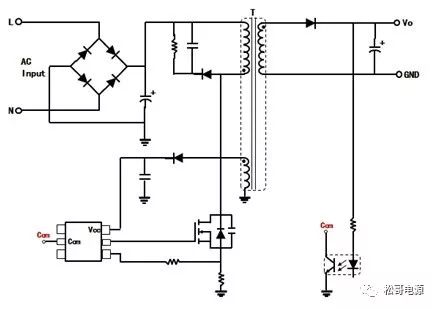 图3:副边(次级)二极管整流 图3:副边(次级)二极管整流
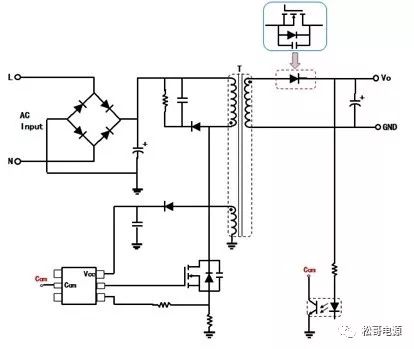 图4:副边(次级)MOSFET同步整流 图4:副边(次级)MOSFET同步整流副边(次级)二极管整流的特点: ①、简单,不需要额外的驱动控制器,成本低;
②、输出电流大时,效率低;
③、可靠性高。 副边(次级)MOSFET同步整流的特点: ①、复杂,需要额外的驱动控制器,成本高;
②、输出电流大时,效率高;
③、相比二极管,可靠性低。 实际应用中,通常将同步整流SSR的MOSFET从高端移到低端,以方便驱动,如图5所示。
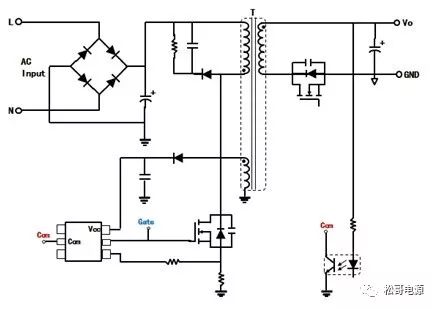 图5:SSR同步整流MOSFET放在低端 图5:SSR同步整流MOSFET放在低端同步整流SSR的MOSFET放在高端的特点: ①、需要自举驱动或浮驱,成本高;
②、EMI好。 同步整流SSR的MOSFET放在低端的特点: ①、直接驱动,驱动简单,成本低;
②、EMI差。 3、原边(初级)控制和副边(次级)控制 PWM主控制器放在原边(初级),这种结构称为原边(初级)控制。为了提高输出电压的精度、负载调整率、线性调整率,原边(初级)控制需要外加光耦和TL431组成反馈环节,其系统带宽小,响应的速度慢。 如果将PWM主控制器放在副边(次级),就可以去除光耦和TL431,直接对输出电压进行控制和调节,响应的速度快,这种结构称为副边(次级)控制。
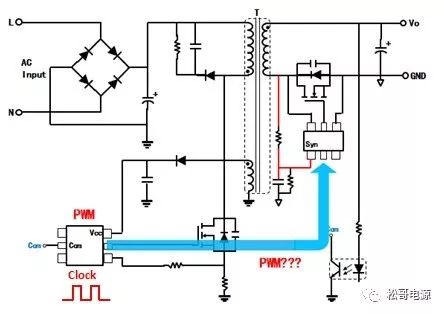 图6:原边(初级)控制 图6:原边(初级)控制
 图7:副边(次级)控制 图7:副边(次级)控制原边(初级)控制的特点: ①、需要光耦和TL431,响应的速度慢;
②、输出保护的速度慢。
③、同步整流连续模式CCM时,副边(次级)需要同步信号。 副边(次级)控制的特点:
①、输出直接检测,不需要光耦和TL431,响应的速度快,输出保护的速度快;
②、副边(次级)同步整流MOSFET直接驱动,不需要同步信号;需要额外器件如脉冲变压器、磁耦合或电容耦合器,传送原边(初级)高压MOSFET的驱动信号。
③、原边(初级)需要起动电路,或副边(次级)有辅助电源进行起动。 4、连续CCM模式或非连续DCM模式 反激变换器可以工作在连续CCM模式或非连续DCM模式,如果一个开关周期结束时,副边(次级)绕组的电流到0,称为非连续DCM模式;如果一个开关周期结束时,副边(次级)绕组的电流不为0,则称连续CCM模式,如图8、图9所示。
 图8:非连续DCM模式 图8:非连续DCM模式
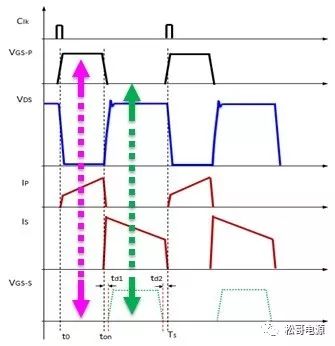 图9:连续CCM模式 图9:连续CCM模式由图8和图9可以看到:反激变换器不同的工作模式,同步整流SSR的工作状态并不相同,这也意味着同步整流SSR的控制方式也会不同。 如果忽略死区时间,连续CCM模式工作时,同步整流SSR有二种状态: ①、原边(初级)高压MOSFET开通,副边(次级)同步整流MOSFET关断;
②、原边(初级)高压MOSFET关断,副边(次级)同步整流MOSFET开通。 同样,如果忽略死区时间,非连续DCM模式工作时,同步整流SSR有三种状态: ①、原边(初级)高压MOSFET开通,副边(次级)同步整流MOSFET关断;
②、原边(初级)高压MOSFET关断,副边(次级)同步整流MOSFET开通;
③、原边(初级)高压MOSFET关断,副边(次级)同步整流MOSFET关断。 5、连续CCM模式的副边(次级)同步整流SSR 如果快充反激变换器工作在连续CCM模式,原边(初级)控制的方式,副边(次级)同步整流MOSFET需要来自原边(初级)的同步信号来控制关断。 通常使用下面二种方式取得副边(次级)的同步驱动信号: (1)直接用副边(次级)绕组,如图10所示; (2)用额外的隔离元件如脉冲变压器,将同步驱动信号从原边(初级)传送到副边(次级),如图12所示。 直接用副边(次级)绕组取同步驱动信号,同步驱动信号的精度非常难控制,很难取得优化的效率和可靠性,有些公司甚至采用数字控制器来提高控制的精度,如图11所示。 使用脉冲变压器取得同步驱动信号,精度高,但成本相对较高。 副边(次级)控制的方式,通常使用脉冲变压器或磁耦合方式将同步驱动信号从副边(次级)传送到原边(初级),如图7所示。
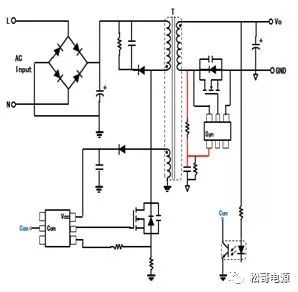 图10:直接用副边(次级)绕组取同步驱动信号 图10:直接用副边(次级)绕组取同步驱动信号
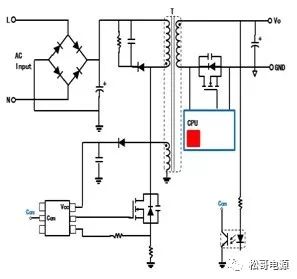 图11:直接用副边(次级)绕组取同步驱动信号+数字控制 图11:直接用副边(次级)绕组取同步驱动信号+数字控制
 图12:脉冲变压器取同步驱动信号 图12:脉冲变压器取同步驱动信号6、非连续DCM模式的副边(次级)同步整流SSR 如果快充反激变换器工作在非连续DCM模式,不管是原边(初级)控制的方式还是副边(次级)控制的方式,都是直接检测同步整流MOSFET的D、S压降,就可以进行控制。 (1)同步整流MOSFET的开通 当同步整流MOSFET的VDS的电压由正变负,其内部的寄生二极管开通后,经过一定的延时,同步整流MOSFET开通,如图13所示。 (2)同步整流MOSFET的关断 同步整流MOSFET导通后,VDS=-Io*Rdson。当副边(次级)绕组电流减小为0时,也就是电流检测信号VDS的电压由负变为0时,同步整流MOSFET关断,如图13所示。
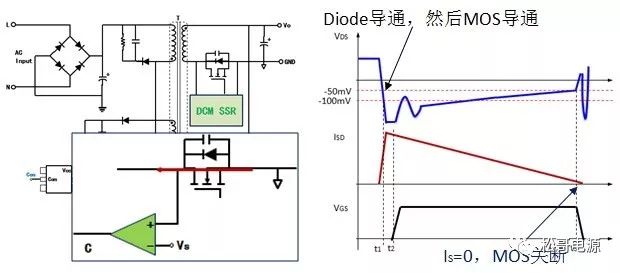 图13:非连续DCM模式同步整流MOSFET的开通和关断 图13:非连续DCM模式同步整流MOSFET的开通和关断实际应用中,同步整流MOSFET在副边(次级)绕组电流为0(VDS=0)之前关断,不同的芯片设定的电流检测参考电压的值并不相同,如-20mV,-50mV,-100mV,-200mV等。 系统的电流检测参考电压是固定的,电流检测参考电压的绝对值越大,干扰误差越小,精度越好。但是,当输出负载电流Io降低时,同步整流MOSFET就会在更大的输出电流时关断,其内部寄生二极管导通的时间更长,因此效率降低,如图14所示。
 图14:电流检测参考电压和同步整流MOSFET关断时刻 图14:电流检测参考电压和同步整流MOSFET关断时刻另外,如果电流检测参考电压的绝对值过小,系统误差和干扰就可能导致同步整流MOSFET在副边(次级)绕组电流过0以后才关断,产生反向倒灌电流,影响效率和系统的可靠性。 高精度的电流检测信号可以提高系统的效率和可靠性,但器件的成本会增加。电流检测信号的精度和以下因素相关: ①、电流检测参考电压的精度和温漂;
②、电流放大器的偏置电压和失调电压、偏置电流和失调电流、温漂;
③、同步整流MOSFET的导通电压Rdson的精度和温漂。 另外,从系统的角度,可以通过数字控制的方式、变化的电流检测参考电压以及变化的同步整流MOSFET驱动电压来改善。 当输出负载电流Io降低时,如果功率MOSFET的驱动电压降低,此时对应的MOSFET导通电压Rdson增加,如图15所示,就可以避免同步整流MOSFET提前关断,减小寄生二极管的导通时间,提高系统的效率。
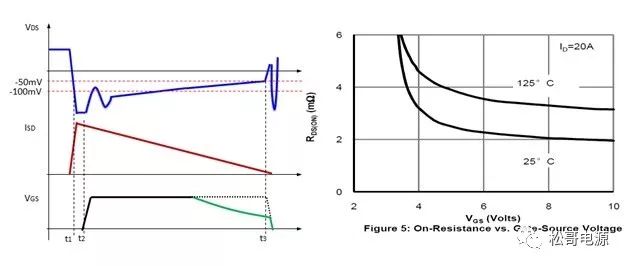 图15:降低驱动电压VGS和同步整流MOSFET关断时刻 图15:降低驱动电压VGS和同步整流MOSFET关断时刻由图14可知,输出负载电流Io降低时,如果电流检测参考电压也降低,这样,在大的输出电流Io时,使用较高的电流检测参考电压,提高控制的精度;在低的输出电流Io时,使用较低的电流检测参考电压,同样可以提高同步整流MOSFET的导通时间,提高系统的效率。 当无法用上述方法进行改善时,也可以在同步整流MOSFET的两端并联肖特基二极管,同步整流MOSFET提前关断后,外接肖特基二极管续流,以提高系统效率,如图16所示。 并联外接肖特基二极管尺寸和同步整流MOSFET差不多,但是,这个方法,可以接受吗?
 图16:外加肖特基二极管提高效率 图16:外加肖特基二极管提高效率7、副边(次级)控制CCM+DCM混合模式 目前,在手机快充的方案中,基本采取二种常用的方案: (1)原边(初级)控制、DCM工作方式。副边(次级)同步整流MOSFET不需要同步信号。 (2)副边(次级)控制、CCM+DCM混合的工作模式(输出负载电流降低时,从CCM到DCM)。副边(次级)同步整流MOSFET直接驱动,其开通和关断的逻辑原理如图17所示: 同步整流MOSFET的开通:当同步整流MOSFET的VDS的电压由正变负,其内部的寄生二极管开通,经过一定的延时,同步整流MOSFET开通。 同步整流MOSFET的关断:
①、当输出电压小于设定值时,使用同步时钟信号控制关断MOSFET,工作在CCM模式。
②、当输出电压大于设定值时,屏蔽同步时钟信号,工作的方式和DCM模式相同,由VDS=-Io*Rdson信号来控制关断同步整流MOSFET。
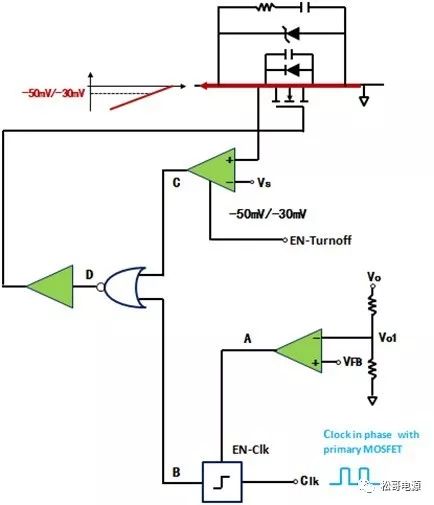 图17:副边(次级)控制同步整流MOSFET关断 图17:副边(次级)控制同步整流MOSFET关断本文转载自: 松哥电源
转载地址: https://mp.weixin.qq.com/s/WN_jOR_Ei-GxeanTa7QAYw
声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有,如涉及侵权,请联系小编邮箱: cathy@eetrend.com 进行处理。
| 


 发表于 2020-9-14 09:41:41
发表于 2020-9-14 09:41:41
 /3
/3 
