电路城论坛有很多优秀的设计项目方案,一直深受广大电子工程师的欢迎,但随着时间和为数众多的内容资源更新,很多优质的资源沉下去了,为激活以往受欢迎的电路项目方案,我们对此按主题进行整理呈现出来,以飨读者。本期主题以“飞行器”为主,整理了20个别出心裁的飞行器项目方案(含代码+电路设计下载资料)。供更多的坛友学习和交流,没有整理到的贴子可以在下方回帖。
1.超声波传感应用于无人机着陆技术解析 马上点击查看
进年来,消费类无人机越来越受欢迎,多用于拍摄震撼的片段、运送救援物资,多数无人机使用各种传感技术实现自主导航、碰撞检测。而你又是否知道,超声波传感尤其有助于无人机着陆、悬停、地面跟踪。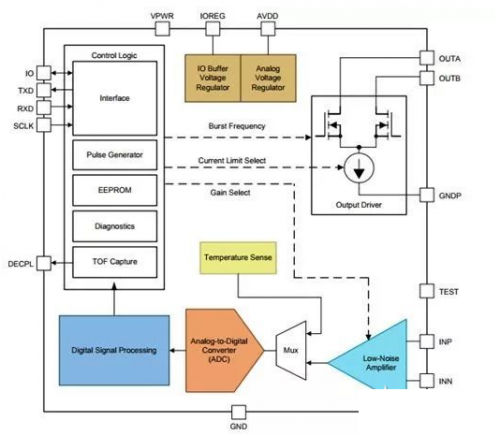
2.AI开源编队无人机cocofly飞控固件烧写马上点击查看
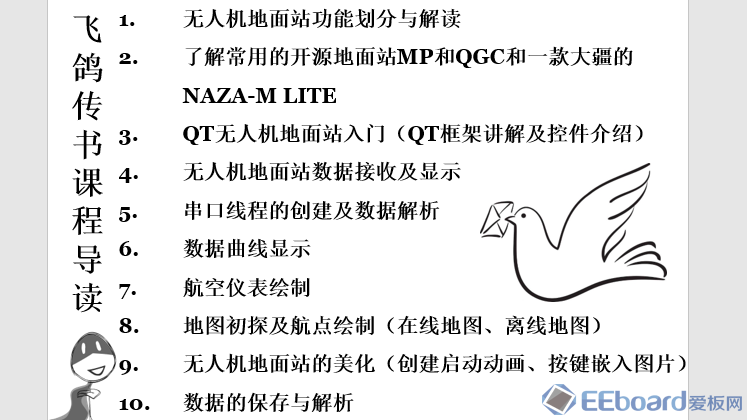
这里的固件是指源代码编译出来的Hex或者Bin文件,其中Hex是十六进制文件、Bin是二进制文件。如下图所示为飞控代码编译出来的Hex文件。 本系列课程总共十大讲,讲从0基础带领大家从认识无人机地面站的组成、实现原理到手把手教大家完成一个属于自己的漂亮的地面站。让大家学的开心,同样玩的开心,更游刃有余。毕竟学习一项技能就是能够让自己玩的开心,更方便。采用c++编程,拖拽控件式搭建界面,易学易用。
CES最火的是什么?无疑是智能无人机了,随着科技的快速发展,无人机也迅速的进入到了大众,特别是国内DJI(大疆创新)。但是呢,看着昂贵的无人机,比如DJI 精灵4需要8000多、御需要6000多,实在是买不起,所以如何自己动手做一款或者组装一款属于自己的无人机呢?本次就针对这个方面,给大家介绍一下如何入手以及需要的知识储备。
5.超声波传感器在无人机领域中的作用马上点击查看 作为前沿科技,无人机领域一直是大家关注的焦点。目前国内首部以“无人机题材”的《南方有乔木》都市剧不同于时下大多围绕着情感纠葛展开的电视剧,该剧独树一帜,以无人机研发为主线,讲述了一个独立创业女性的故事。由此可见无人机市场的火爆程度
在无人机飞行控制系统中,飞行控制器是其核心部件,它负责飞行控制系统信号的采集、控制律的解算、飞机的姿态和速度,以及与地面设备的通讯等工作。随着无人机越来越广泛的应用,它所完成的任务也越来越复杂,对无人机的机动性要求也越来越高,这就要求无人机的控制核心向高集成度和小型化方向发展。

|
WiFi模块对于无人机有什么作用呢?其实大部分无人机是通过wifi连接到手机的。 WiFi模块的作用就是传递来自地面端的控制信号的,所以wifi模块起到了信号连接的作用。
之前电子设计竞赛我和队友们弄的四轴,我们用的是STM32作为图像处理芯片的,然后把处理之后的信息传给M4。写的是跟踪黑色方块,返回飞行器相对黑色方块位置的信息
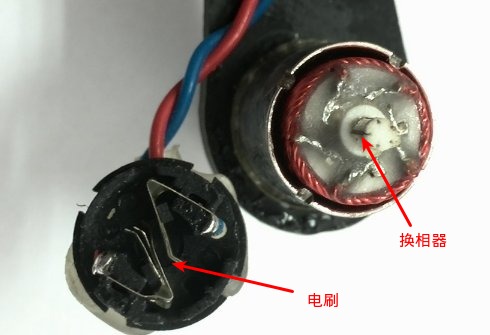
9.基于STM32的微型开源四轴飞行器之 航模电机马上点击查看 电动机有有刷和无刷之分。结构上,无刷电机和有刷电机有相似之处,也有转子和定子,只不过和有刷电机的结构相反;有刷电机的转子是线圈绕组,和动力输出轴相连,定子是永磁磁钢;无刷电机的转子是永磁磁钢,连同外壳一起和输出轴相连,定子是绕组线圈,去掉了有刷电机用来交替变换电磁场的换向电刷,故称之为无刷电机(Brushless motor)。 |
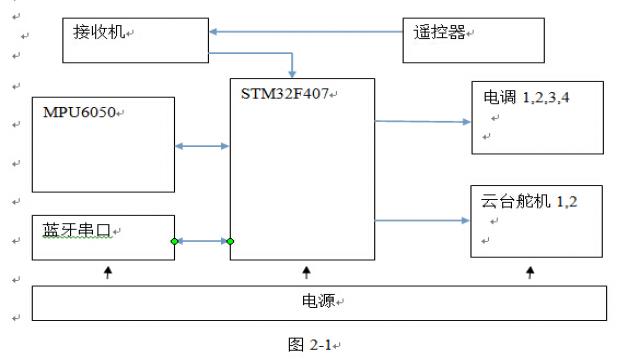
10.基于STM32F4的四轴航拍飞行器(开源) 马上点击查看 本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加互补滤波作为姿态解算算法,PID作为控制器,实现飞行,云台增稳等功能。具有灵活轻盈,延展性,适应性强好等特点。
11.基于STM32的H型微型四轴飞行器(硬件+源代码+文档) 马上点击查看 四轴飞行器主控板和遥控器电路原理图和PCB源文件截图:
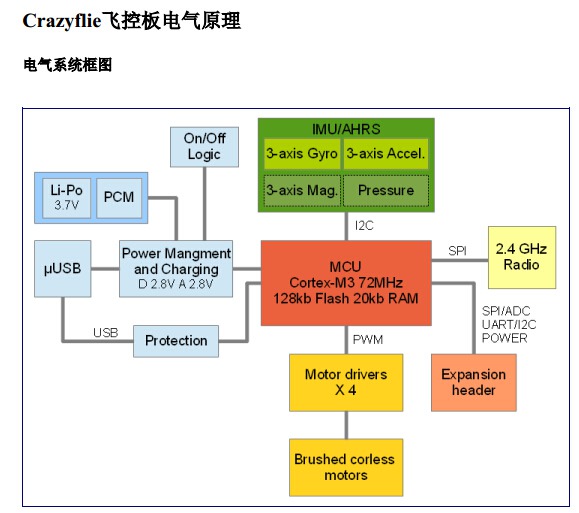
12.疯狂飞行器Crazyflie电路原理深入解读【附详细原理图】 马上点击查看
Crazyfli是目前全世界最小的四轴飞行器,仅重19克,相对的两翼之间长度为9厘米。有两个不同的版本,区别在于传感器的数量。这个小四轴飞行器可以在空中飞行长达7分钟,通过一个标准的USB接头给锂聚合物电池充电需要约20分钟。
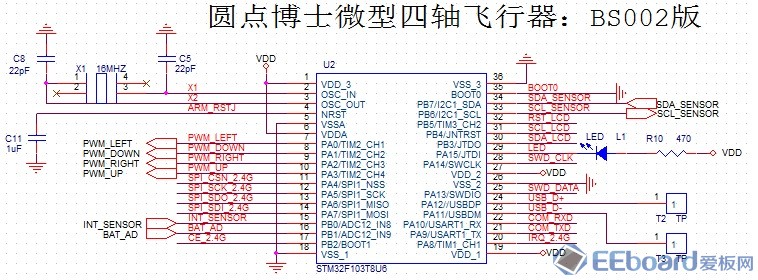
1. 电气原理

|
13.四旋翼飞行器在MATLAB中的仿真程序马上点击查看 这是四旋翼飞行器在MATLAB中的仿真程序,包括simulink仿真系统和程序
14杭州电子科大-基于STM32F4的四轴飞行器控制系统 马上点击查看 一、项目名称:
基于STM32F4的四轴飞行器控制系统
15四旋翼自主飞行器设计+【2015年电赛c题】马上点击查看
16.武汉理工大学-基于STM32F4的四轴航拍飞行器马上点击查看 本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加互补滤波作为姿态解算算法,以经典PID作为控制器,实现飞行,云台增稳,航拍等功能。略微改装还能完成其他任务。具有灵活轻盈,延展性,适应性强好等特点。
四轴飞行器教程四轴飞行器教程 四轴入门超详细的好文档【INF】BlackHole1开发手册
四轴开发思路及方案
18.基于WiFi的四轴飞行器 (+户外实测) 马上点击查看 本设计中四轴飞行器无线控制使用WiFi方案,具有更加通用易用性。可以实现飞行器姿态数据、控制参数、状态信息等数据的更新和控制。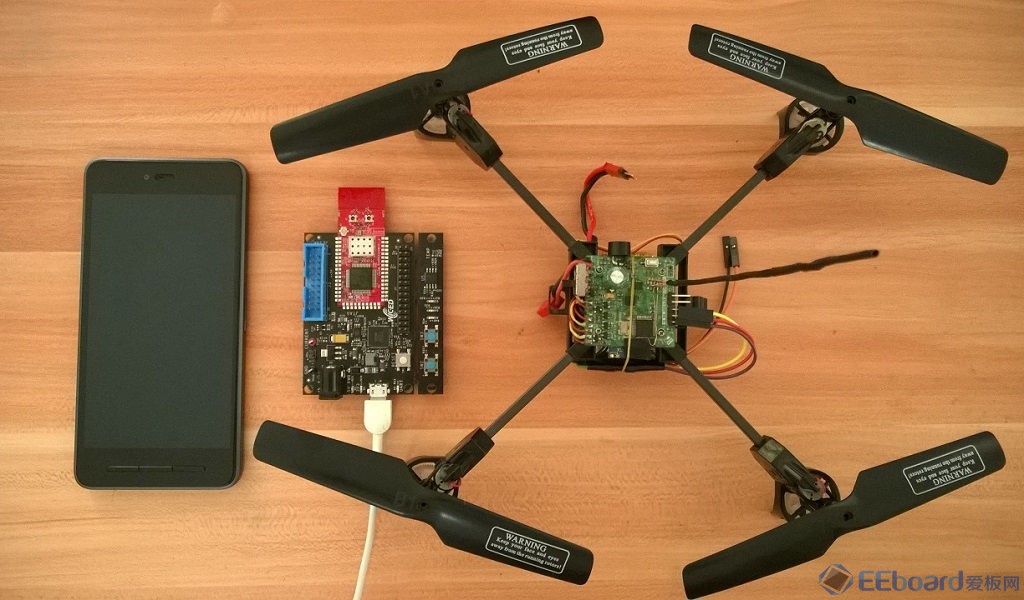
19.开帖设计第二代圆点博士微型四轴飞行器---全开源马上点击查看
光看设计资料不过瘾?有疑惑?来《大咖问答》
| 
 [复制链接]
[复制链接]

 发表于 2020-3-20 16:28:02
发表于 2020-3-20 16:28:02








 发表于 2020-4-8 14:38:47
发表于 2020-4-8 14:38:47
 /3
/3 
