
|
1004| 0
|
[经验] 如何运用反馈电路实现对单相无刷电机的控制? |


 发表于 2020-2-24 09:08:01
发表于 2020-2-24 09:08:01

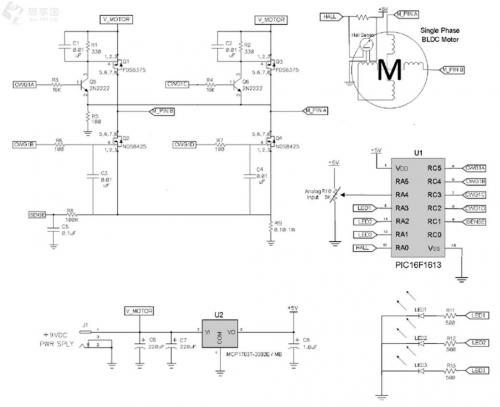
 沟道器件的芯片尺寸必须是 N 沟道器件的 2 到 3 倍才能匹配 RDSon 性能。但是,芯片尺寸越大,QG 的影响也越大。因此,选择 MOSFET 时,务必先确定 RDSon 和 QG 二者中哪个对开关性能的影响更大,然后再相应地进行选择。
沟道器件的芯片尺寸必须是 N 沟道器件的 2 到 3 倍才能匹配 RDSon 性能。但是,芯片尺寸越大,QG 的影响也越大。因此,选择 MOSFET 时,务必先确定 RDSon 和 QG 二者中哪个对开关性能的影响更大,然后再相应地进行选择。
关闭
站长推荐
站长推荐 /3
/3 
ICP经营许可证 苏B2-20140176 苏ICP备14012660号-2 苏州灵动帧格网络科技有限公司 版权所有.

Powered by Discuz! X3.4
Copyright © 2001-2024, Tencent Cloud.
|
1004| 0
|
[经验] 如何运用反馈电路实现对单相无刷电机的控制? |
/3
Powered by Discuz! X3.4
Copyright © 2001-2024, Tencent Cloud.