描述步进电机在智能机器人项目中无处不在:如果正在做进行机器人或自动化项目,很可能会使用它们。从3D打印机和CNC轧机到空中曲棍球和杂耍机器人,几乎所有DIY项目都可以使用它们。但是,在工业自动化领域,无刷伺服电机已经接管了,很明显的原因:它们不会失步,功能更强大,效率更高且更安静。
但是,无刷电机并非昂贵的工业自动化设备所独有。实际上,您可以在其他行业商店获得一些功能强大且便宜的电动机。驱动这些电动机的电子设备也很便宜。那么,为什么步进电机没有在工业中使用呢?
老实说,我不知道。认真地讲,允许这样做的驱动程序应该明确存在。
但是由于没有,我决定做一个。
这个项目是开源的,包括硬件和软件,我非常开心大家能各抒己见。
关键规格:- 2个电机通道,设计用于大于100A的峰值电流。
- 1个DC-DC转换器通道
- 24V总线电压
- USB,CAN,UART,PWM和步进/目录接口(更多内容请参见下文)
- 编码器反馈,实现任意精确的运动
- 支持电源再生
- 使用高功率密度锂聚合物电池意味着仅需适度的电源即可实现> 1kW的峰值功率输出。
- 它将具有各种最佳控制策略和运动曲线。
- 硬件和软件上的许可:您可以在任何喜欢的项目中使用此项目,甚至可以在商业产品中使用。
演示版该设计基于两个早期的原型。 这是v2的一些非常简单的演示。这些测试中的峰值输出功率仅为60W。新版本(v3)将能够提供更多功率。
介面- USB串行端口-PC,BeagleBone,RaspberryPi等
- CAN-CANOpen和CiA 402是可能的
- UART-Arduino,mBed等
- PWM-RC接收器,Arduino等
- 步/方向-现有的运动控制器
- 一些通用数字和模拟引脚
通讯协定- 用于与现有自动化工具接口的G代码解析器
- 多种命令模式
- Goto(具有轨迹规划的位置控制)
- 位置指令
- 速度指令
- 扭矩指令
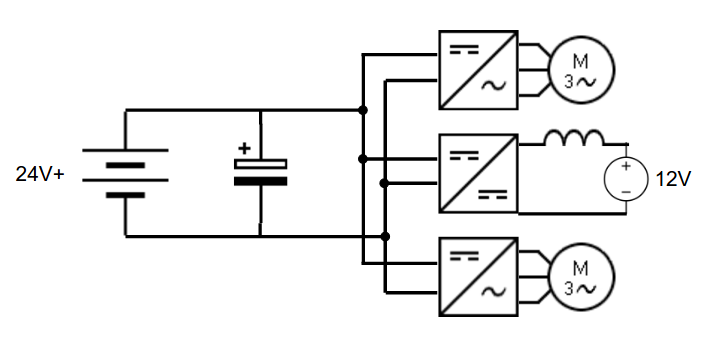
建筑该驱动器旨在提供令人难以置信的高峰值功率,每个电机通道大于1kW。但是,可以提供这种电源的电源很昂贵。而且,当致动器减速时,会吸收能量。大多数电源不喜欢将能量倾倒回去。 解决方案:在直流母线上放置大功率储能。像电池这样一个可以围绕3kW的交付。这些类型的电池还具有较高的充电率,如果再生仅在几百毫秒内完成,则它们可能会处理比指定时间更多的时间。因此,它们应该能够处理大多数机器人应用中的全部再生功率。 这意味着我们有一个可变电压的直流母线,它随电池的充电状态而变化。因此,我们为系统供电的方式是通过DC-DC转换器。这还有另一个好处:我们可以使用任何电压电源并将其转换为总线电压。我希望大多数人会使用便宜的ATX电源(特别是12V电源轨)。在许多机器人应用中,运动由几个离散的运动组成,其中只有一些是高功率的。在这种情况下,我们可以使用非常高的峰值功率,但只需要非常适中的电源即可。 使用电池稳定直流总线的另一点好处是,如果这些驱动器中的多个驻留在同一总线上,则不会为总线电压的调节而战:单板可以将DC-DC连接到一个PSU,系统中的其余板卡都可以使用总线。如果确实如此,您甚至可以跳过填充从属板上的DC-DC。 该系统还能够使用制动电阻器来释放再生能量,而不是使用电池来吸收再生能量。这是一个更简单且可能更安全的设置,也是项目首先在电池存储功能就绪之前使用的设置。
应用领域因此,该项目对某些事情有好处,但并非所有事情都有。 如果满足以下条件,则应在项目中使用此驱动器: - 您需要高功率:每通道峰值功率> 1kW!
- 您需要高精度:编码器反馈控制意味着精度与编码器的精度一样高,后者可能非常高。
- 您需要可靠性:编码器反馈可确保驱动器从定位错误中恢复:不再遗漏任何步骤。
如果出现以下情况,则不应在项目中使用该驱动器: - 您需要高扭矩,但不在乎速度,也不想使用任何齿轮。如果是这种情况,步进器可能更适合您的项目
- 如果您对超小型电机和机器人感兴趣,那么应该改用这些超棒的微型机器人!
如果您需要工业级电动机的可靠性和耐用性,则不应使用业余电动机。但是,驱动器电子设备和软件在成熟时应该能够可靠地执行。
| 


 发表于 2020-1-6 15:57:59
发表于 2020-1-6 15:57:59

 /3
/3 

