|
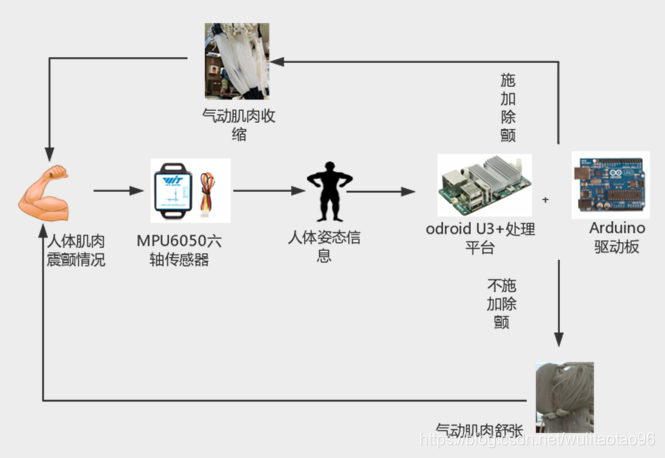
之前介绍过,项目的第一项操作是要采集帕金森病人的震颤数据,整体架构图如下:
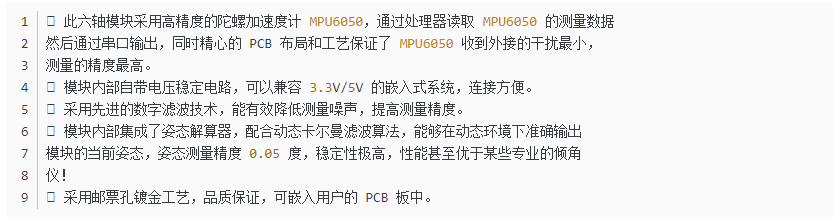
这里采用的是一款基于MPU6050的维特智能的JY61型号传感器,好处在于内置卡尔曼滤波,直接可以通过串口输出六轴数据,大大方便了编程效率。模块如图:
其产品介绍如下(摘自使用说明书):
性能参数: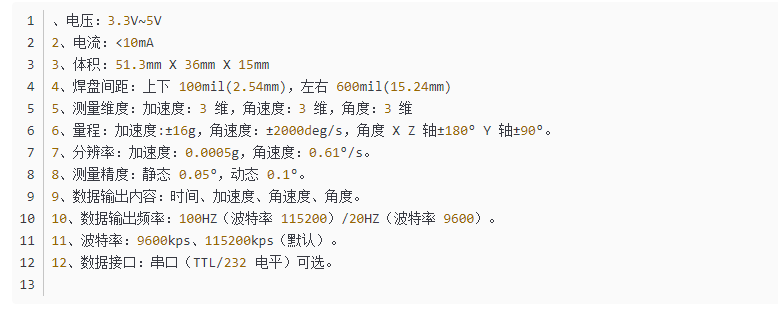
经测试,用在我的项目里精度已经足够。采用TTL转USB线后,与我的linux开发板相连接,发现问题在于官方给出的例程不能直接拿来使用,考虑到python的通用性,因此利用python改写读取程序后分享给大家。
无论是windows还是linux,亲测都可以通过python成功运行。注意是python3版本。 ---------------------
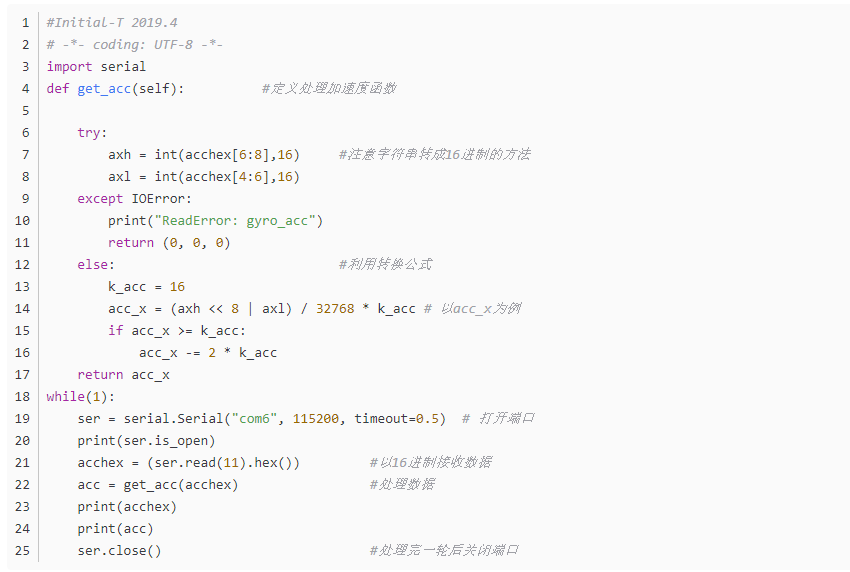
第一版:由于自带例程没有python样例,因此尝试自己读取处理。 注意: 1 安装的包名叫pyserial而不是serial 2 在linux下不用安装驱动,直接利用串口调试工具即可看到串口号 读取加速度: #Initial-T 2019.4 # -*- coding: UTF-8 -*- import serial def get_acc(self): #定义处理加速度函数
try: axh = int(acchex[6:8],16) #注意字符串转成16进制的方法 axl = int(acchex[4:6],16) except IOError: print("ReadError: gyro_acc") return (0, 0, 0) else: #利用转换公式 k_acc = 16 acc_x = (axh << 8 | axl) / 32768 * k_acc # 以acc_x为例 if acc_x >= k_acc: acc_x -= 2 * k_acc return acc_x while(1): ser = serial.Serial("com6", 115200, timeout=0.5) # 打开端口 print(ser.is_open) acchex = (ser.read(11).hex()) #以16进制接收数据 acc = get_acc(acchex) #处理数据 print(acchex) print(acc) ser.close() #处理完一轮后关闭端口
截图示意: 读取全部数据:
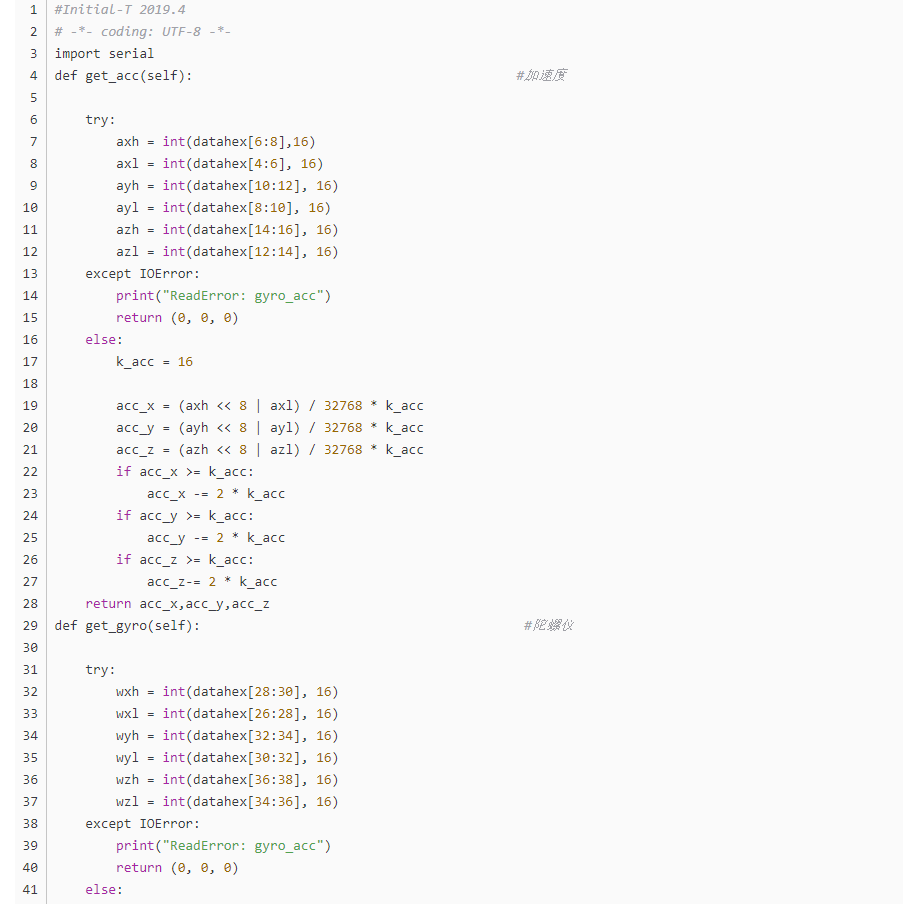
#Initial-T 2019.4 # -*- coding: UTF-8 -*- import serial def get_acc(self): #加速度
try: axh = int(datahex[6:8],16) axl = int(datahex[4:6], 16) ayh = int(datahex[10:12], 16) ayl = int(datahex[8:10], 16) azh = int(datahex[14:16], 16) azl = int(datahex[12:14], 16) except IOError: print("ReadError: gyro_acc") return (0, 0, 0) else: k_acc = 16
acc_x = (axh << 8 | axl) / 32768 * k_acc acc_y = (ayh << 8 | ayl) / 32768 * k_acc acc_z = (azh << 8 | azl) / 32768 * k_acc if acc_x >= k_acc: acc_x -= 2 * k_acc if acc_y >= k_acc: acc_y -= 2 * k_acc if acc_z >= k_acc: acc_z-= 2 * k_acc return acc_x,acc_y,acc_z def get_gyro(self): #陀螺仪
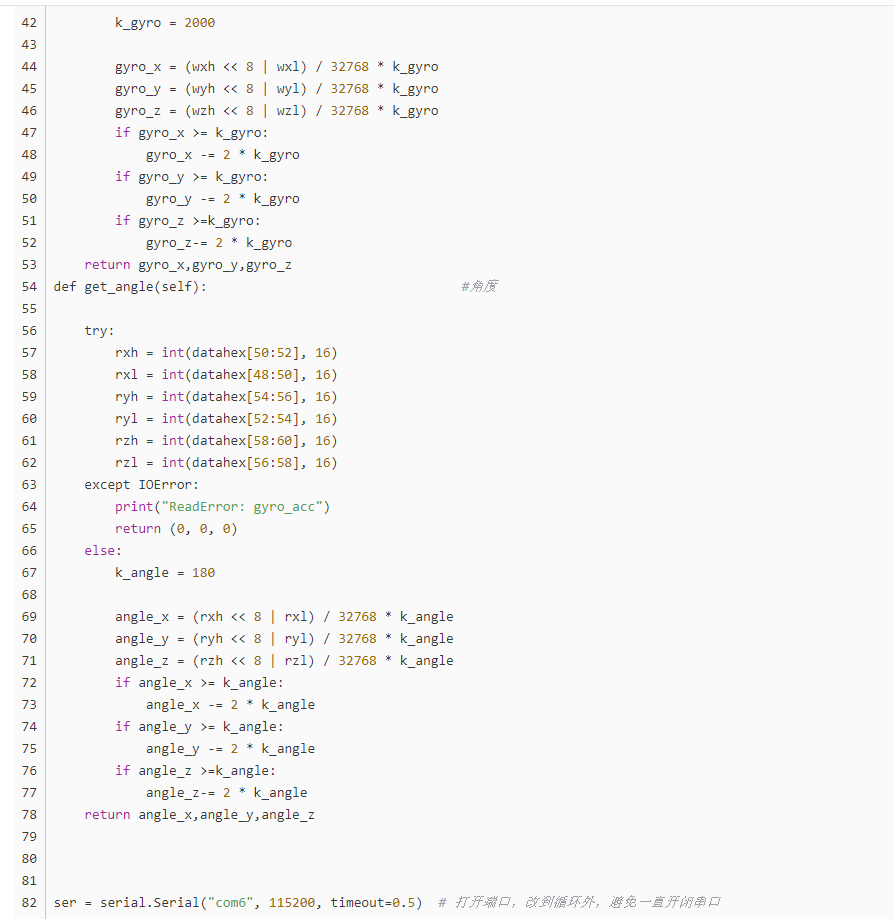
try: wxh = int(datahex[28:30], 16) wxl = int(datahex[26:28], 16) wyh = int(datahex[32:34], 16) wyl = int(datahex[30:32], 16) wzh = int(datahex[36:38], 16) wzl = int(datahex[34:36], 16) except IOError: print("ReadError: gyro_acc") return (0, 0, 0) else: k_gyro = 2000
gyro_x = (wxh << 8 | wxl) / 32768 * k_gyro gyro_y = (wyh << 8 | wyl) / 32768 * k_gyro gyro_z = (wzh << 8 | wzl) / 32768 * k_gyro if gyro_x >= k_gyro: gyro_x -= 2 * k_gyro if gyro_y >= k_gyro: gyro_y -= 2 * k_gyro if gyro_z >=k_gyro: gyro_z-= 2 * k_gyro return gyro_x,gyro_y,gyro_z def get_angle(self): #角度
try: rxh = int(datahex[50:52], 16) rxl = int(datahex[48:50], 16) ryh = int(datahex[54:56], 16) ryl = int(datahex[52:54], 16) rzh = int(datahex[58:60], 16) rzl = int(datahex[56:58], 16) except IOError: print("ReadError: gyro_acc") return (0, 0, 0) else: k_angle = 180
angle_x = (rxh << 8 | rxl) / 32768 * k_angle angle_y = (ryh << 8 | ryl) / 32768 * k_angle angle_z = (rzh << 8 | rzl) / 32768 * k_angle if angle_x >= k_angle: angle_x -= 2 * k_angle if angle_y >= k_angle: angle_y -= 2 * k_angle if angle_z >=k_angle: angle_z-= 2 * k_angle return angle_x,angle_y,angle_z
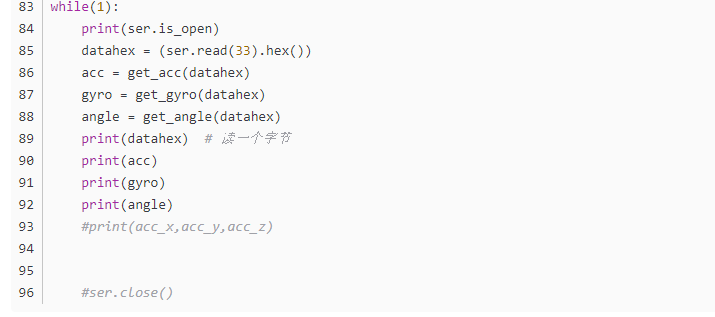
ser = serial.Serial("com6", 115200, timeout=0.5) # 打开端口,改到循环外,避免一直开闭串口 while(1): print(ser.is_open) datahex = (ser.read(33).hex()) acc = get_acc(datahex) gyro = get_gyro(datahex) angle = get_angle(datahex) print(datahex) # 读一个字节 print(acc) print(gyro) print(angle) #print(acc_x,acc_y,acc_z)
#ser.close() 截图示意: 结果对比: 输出: (-0.2060546875, -0.11181640625, 3.00634765625) (0.0, 0.0, 0.0) (-2.0928955078125, 3.9166259765625, 0.0) 截图示意:
上位机 经对比,处理后数据与自带上位机数据一致。
第二版:增加了校验和的验证,使其传输更加稳定。添加了更多注释便于理解
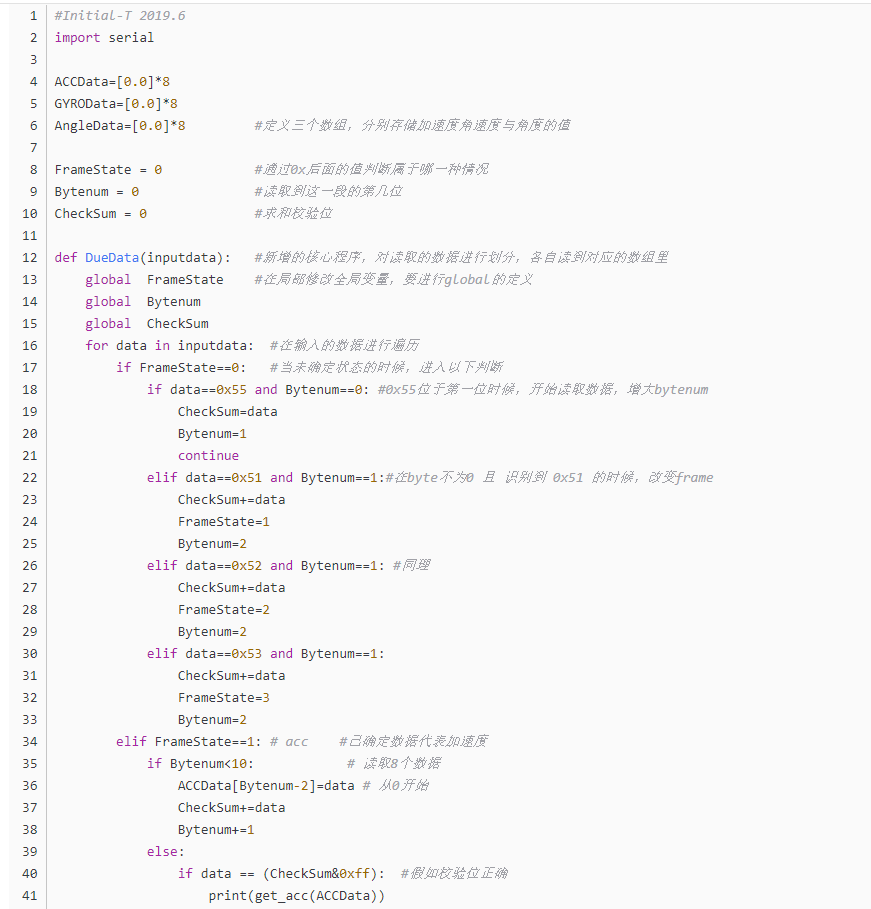
#Initial-T 2019.6 import serial
ACCData=[0.0]*8 GYROData=[0.0]*8 AngleData=[0.0]*8 #定义三个数组,分别存储加速度角速度与角度的值
FrameState = 0 #通过0x后面的值判断属于哪一种情况 Bytenum = 0 #读取到这一段的第几位 CheckSum = 0 #求和校验位
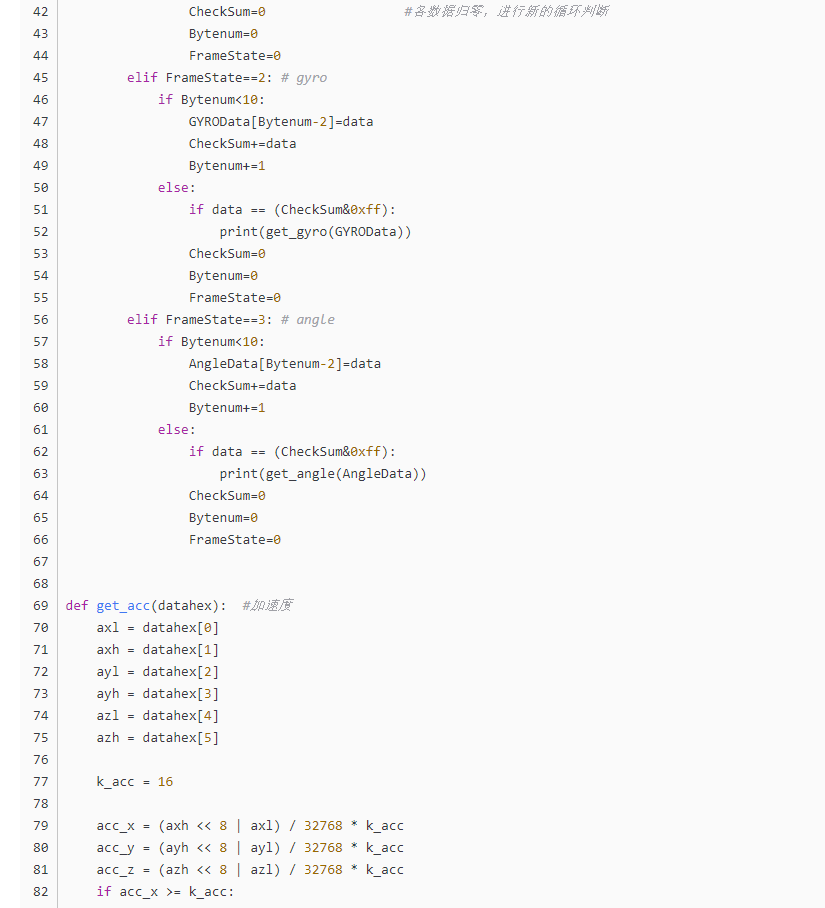
def DueData(inputdata): #新增的核心程序,对读取的数据进行划分,各自读到对应的数组里 global FrameState #在局部修改全局变量,要进行global的定义 global Bytenum global CheckSum for data in inputdata: #在输入的数据进行遍历 if FrameState==0: #当未确定状态的时候,进入以下判断 if data==0x55 and Bytenum==0: #0x55位于第一位时候,开始读取数据,增大bytenum CheckSum=data Bytenum=1 continue elif data==0x51 and Bytenum==1:#在byte不为0 且 识别到 0x51 的时候,改变frame CheckSum+=data FrameState=1 Bytenum=2 elif data==0x52 and Bytenum==1: #同理 CheckSum+=data FrameState=2 Bytenum=2 elif data==0x53 and Bytenum==1: CheckSum+=data FrameState=3 Bytenum=2 elif FrameState==1: # acc #已确定数据代表加速度 if Bytenum<10: # 读取8个数据 ACCData[Bytenum-2]=data # 从0开始 CheckSum+=data Bytenum+=1 else: if data == (CheckSum&0xff): #假如校验位正确 print(get_acc(ACCData)) CheckSum=0 #各数据归零,进行新的循环判断 Bytenum=0 FrameState=0 elif FrameState==2: # gyro if Bytenum<10: GYROData[Bytenum-2]=data CheckSum+=data Bytenum+=1 else: if data == (CheckSum&0xff): print(get_gyro(GYROData)) CheckSum=0 Bytenum=0 FrameState=0 elif FrameState==3: # angle if Bytenum<10: AngleData[Bytenum-2]=data CheckSum+=data Bytenum+=1 else: if data == (CheckSum&0xff): print(get_angle(AngleData)) CheckSum=0 Bytenum=0 FrameState=0
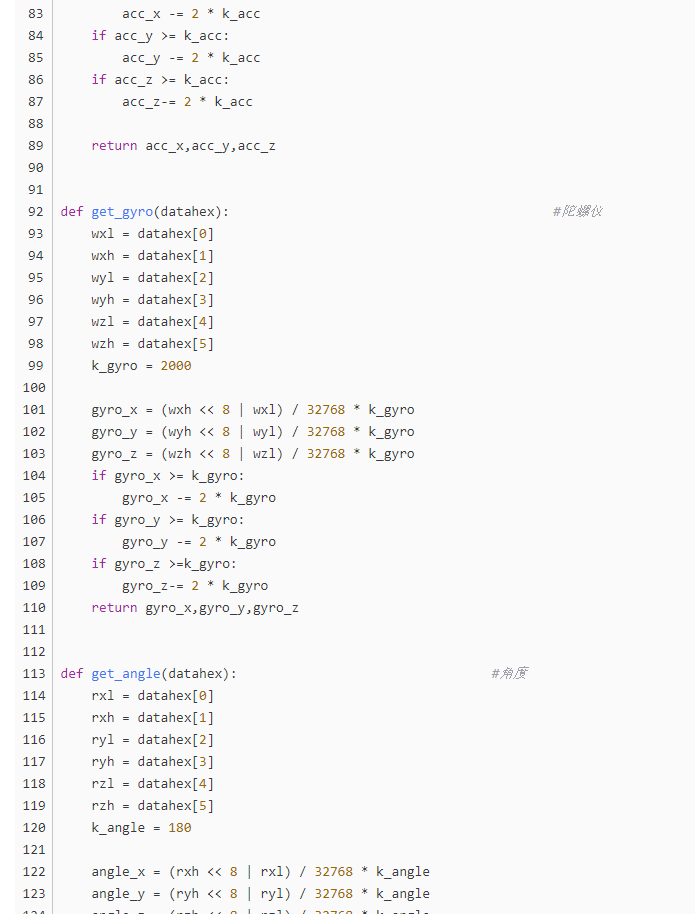
def get_acc(datahex): #加速度 axl = datahex[0] axh = datahex[1] ayl = datahex[2] ayh = datahex[3] azl = datahex[4] azh = datahex[5]
k_acc = 16
acc_x = (axh << 8 | axl) / 32768 * k_acc acc_y = (ayh << 8 | ayl) / 32768 * k_acc acc_z = (azh << 8 | azl) / 32768 * k_acc if acc_x >= k_acc: acc_x -= 2 * k_acc if acc_y >= k_acc: acc_y -= 2 * k_acc if acc_z >= k_acc: acc_z-= 2 * k_acc
return acc_x,acc_y,acc_z
def get_gyro(datahex): #陀螺仪 wxl = datahex[0] wxh = datahex[1] wyl = datahex[2] wyh = datahex[3] wzl = datahex[4] wzh = datahex[5] k_gyro = 2000
gyro_x = (wxh << 8 | wxl) / 32768 * k_gyro gyro_y = (wyh << 8 | wyl) / 32768 * k_gyro gyro_z = (wzh << 8 | wzl) / 32768 * k_gyro if gyro_x >= k_gyro: gyro_x -= 2 * k_gyro if gyro_y >= k_gyro: gyro_y -= 2 * k_gyro if gyro_z >=k_gyro: gyro_z-= 2 * k_gyro return gyro_x,gyro_y,gyro_z
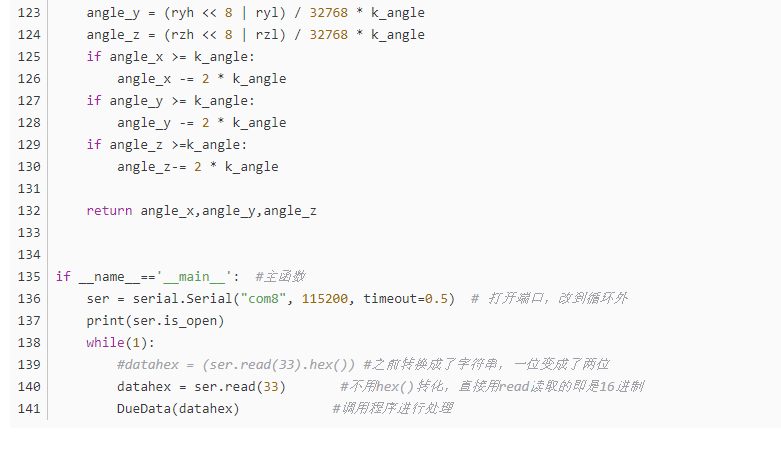
def get_angle(datahex): #角度 rxl = datahex[0] rxh = datahex[1] ryl = datahex[2] ryh = datahex[3] rzl = datahex[4] rzh = datahex[5] k_angle = 180
angle_x = (rxh << 8 | rxl) / 32768 * k_angle angle_y = (ryh << 8 | ryl) / 32768 * k_angle angle_z = (rzh << 8 | rzl) / 32768 * k_angle if angle_x >= k_angle: angle_x -= 2 * k_angle if angle_y >= k_angle: angle_y -= 2 * k_angle if angle_z >=k_angle: angle_z-= 2 * k_angle
return angle_x,angle_y,angle_z
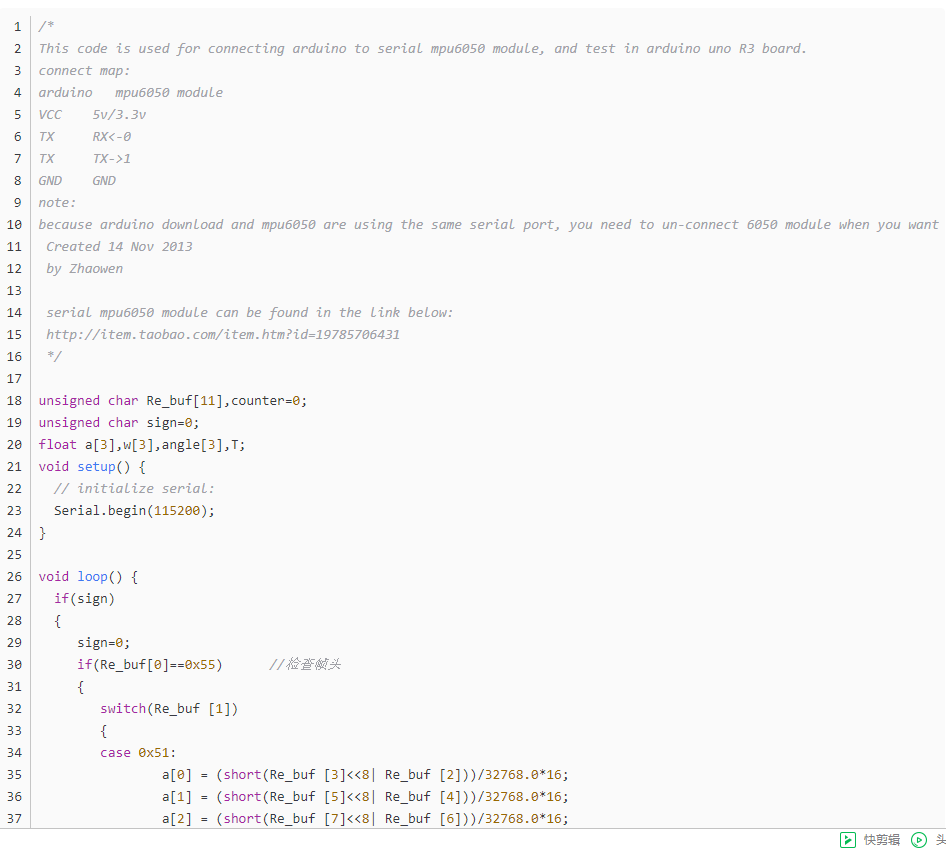
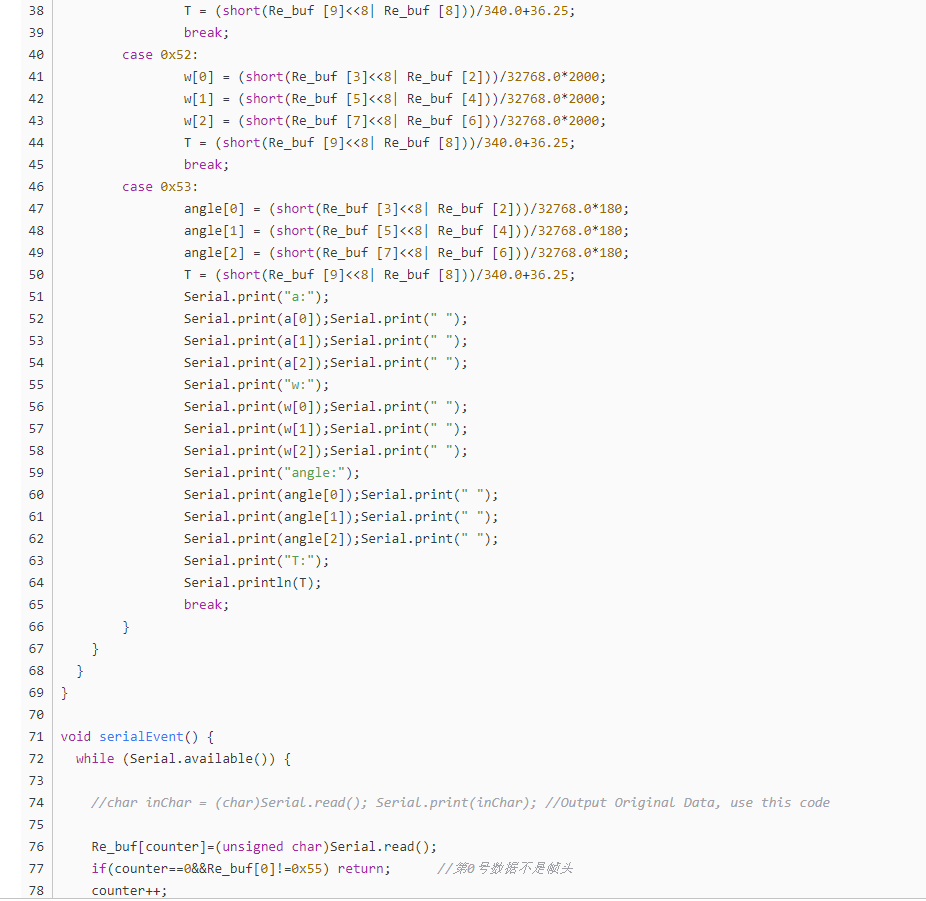
if __name__=='__main__': #主函数 ser = serial.Serial("com8", 115200, timeout=0.5) # 打开端口,改到循环外 print(ser.is_open) while(1): #datahex = (ser.read(33).hex()) #之前转换成了字符串,一位变成了两位 datahex = ser.read(33) #不用hex()转化,直接用read读取的即是16进制 DueData(datahex) #调用程序进行处理 附上Arduino读取程序样例:
/* This code is used for connecting arduino to serial mpu6050 module, and test in arduino uno R3 board. connect map: arduino mpu6050 module VCC 5v/3.3v TX RX<-0 TX TX->1 GND GND note: because arduino download and mpu6050 are using the same serial port, you need to un-connect 6050 module when you want to download program to arduino. Created 14 Nov 2013 by Zhaowen
serial mpu6050 module can be found in the link below:
*/
unsigned char Re_buf[11],counter=0; unsigned char sign=0; float a[3],w[3],angle[3],T; void setup() { // initialize serial: Serial.begin(115200); }
void loop() { if(sign) { sign=0; if(Re_buf[0]==0x55) //检查帧头 { switch(Re_buf [1]) { case 0x51: a[0] = (short(Re_buf [3]<<8| Re_buf [2]))/32768.0*16; a[1] = (short(Re_buf [5]<<8| Re_buf [4]))/32768.0*16; a[2] = (short(Re_buf [7]<<8| Re_buf [6]))/32768.0*16; T = (short(Re_buf [9]<<8| Re_buf [8]))/340.0+36.25; break; case 0x52: w[0] = (short(Re_buf [3]<<8| Re_buf [2]))/32768.0*2000; w[1] = (short(Re_buf [5]<<8| Re_buf [4]))/32768.0*2000; w[2] = (short(Re_buf [7]<<8| Re_buf [6]))/32768.0*2000; T = (short(Re_buf [9]<<8| Re_buf [8]))/340.0+36.25; break; case 0x53: angle[0] = (short(Re_buf [3]<<8| Re_buf [2]))/32768.0*180; angle[1] = (short(Re_buf [5]<<8| Re_buf [4]))/32768.0*180; angle[2] = (short(Re_buf [7]<<8| Re_buf [6]))/32768.0*180; T = (short(Re_buf [9]<<8| Re_buf [8]))/340.0+36.25; Serial.print("a:"); Serial.print(a[0]);Serial.print(" "); Serial.print(a[1]);Serial.print(" "); Serial.print(a[2]);Serial.print(" "); Serial.print("w:"); Serial.print(w[0]);Serial.print(" "); Serial.print(w[1]);Serial.print(" "); Serial.print(w[2]);Serial.print(" "); Serial.print("angle:"); Serial.print(angle[0]);Serial.print(" "); Serial.print(angle[1]);Serial.print(" "); Serial.print(angle[2]);Serial.print(" "); Serial.print("T:"); Serial.println(T); break; } } } }
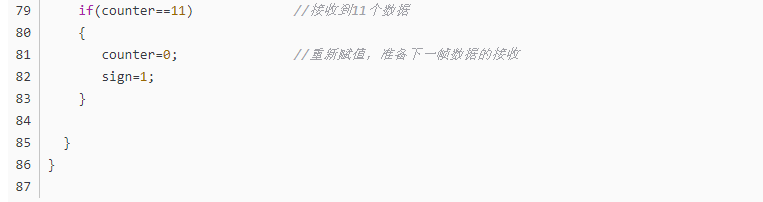
void serialEvent() { while (Serial.available()) {
//char inChar = (char)Serial.read(); Serial.print(inChar); //Output Original Data, use this code
Re_buf[counter]=(unsigned char)Serial.read(); if(counter==0&&Re_buf[0]!=0x55) return; //第0号数据不是帧头 counter++; if(counter==11) //接收到11个数据 { counter=0; //重新赋值,准备下一帧数据的接收 sign=1; }
} } 截图示意:
1、利用python的pyserial模块
2、注意不能出现占用端口的现象
3、更改程序要注意端口是否对应
4、不关闭串口再循环的时候,会出现串口被占用的错误
5、字符串要进行类型转换才能参与计算
6、try的工作原理是,当开始一个try语句后,python就在当前程序的上下文中作标记,这样当异常出现时就可以回到这里,try子句先执行,接下来会发生什么依赖于执行时是否出现异常。
7、如果当try后的语句执行时发生异常,python就跳回到try并执行第一个匹配该异常的except子句,异常处理完毕,控制流就通过整个try语句(除非在处理异常时又引发新的异常)。
8、如果在try后的语句里发生了异常,却没有匹配的except子句,异常将被递交到上层的try,或者到程序的最上层(这样将结束程序,并打印缺省的出错信息)。
9、如果在try子句执行时没有发生异常,python将执行else语句后的语句(如果有else的话),然后控制流通过整个try语句。 | 

 发表于 2019-8-8 10:13:07
发表于 2019-8-8 10:13:07



 需要注意的问题有:
需要注意的问题有:  /4
/4 

