
|
1699| 0
|
懒兔子ZedBoard学习手记(一) First Step——建立Xilinx交叉编译环境 |
| ||


 发表于 2013-12-4 16:58:28
发表于 2013-12-4 16:58:28
 PATH
PATH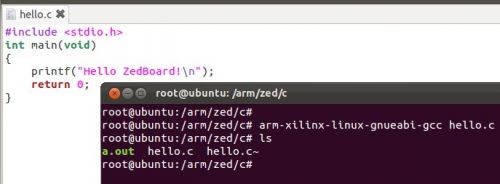

关闭
站长推荐
站长推荐 /4
/4 
ICP经营许可证 苏B2-20140176 苏ICP备14012660号-2 苏州灵动帧格网络科技有限公司 版权所有.

Powered by Discuz! X3.4
Copyright © 2001-2024, Tencent Cloud.
|
1699| 0
|
懒兔子ZedBoard学习手记(一) First Step——建立Xilinx交叉编译环境 |
| ||
/4
Powered by Discuz! X3.4
Copyright © 2001-2024, Tencent Cloud.