TA的每日心情 | 无聊
2015-8-17 09:38 |
|---|
签到天数: 361 天 连续签到: 1 天 [LV.8]以坛为家I
|
经过前面的工作,现在终于可以开始为自定义外设编写驱动了。首先声明兔子不是搞软件的,而是个硬件工程师,有时候也肩负起逻辑的工作,因而做的有问题的地方还需要童鞋们指出,共同进步啊。其实Linux驱动程序与一般的单片机C程序差别不大,只是在调用硬件设备的同时,实现了一个与操作系统的标准接口,只要完成了驱动部分,上层软件就能通过Linux系统的标准接口来访问设备,而不用关心寄存器等具体的硬件问题。
不过为了让不熟悉驱动和软件的同学不至于一头雾水,就稍稍做些普及工作吧。
下面是一个简单的驱动模块:
#include
#include
MODULE_LICENSE("Dual BSD/GPL");
static int hello_init(void)
{
printk("Module init complete!");
return 0;
}
static void hello_exit(void)
{
printk("Module exit!");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_AUTHOR("Nightmare@EEFOCUS");
MODULE_DESCRIPTION("HelloWorldDriver");
MODULE_ALIAS("It's only a test");
它为我们展现了驱动程序模块最基本的封装形式,init函数会在加载模块时执行,exit函数则在模块卸载时运行,在ZedBoard板上加载这个驱动,相应的字符串信息会通过串口打印出来。
之前我们已经提到了,对自定义外设的访问实际就是操作特定的物理地址空间,但Linux系统直接操作物理空间缺乏可移植性也不安全,因此需要对这个物理地址空间映射到虚拟地址空间(具体应该是通过MMU实现的吧,留作疑问),转变成系统能够直接访问的空间。映射是通过ioremap实现的,这个函数定义在Linux内核的asm/io.h文件中。
对设备进行映射的操作方法大体如下:
static void __iomem *GPIO_Regs;
GPIO_Regs = ioremap(MY_GPIO_PHY_ADDR, MY_GPIO_REG_NUM);
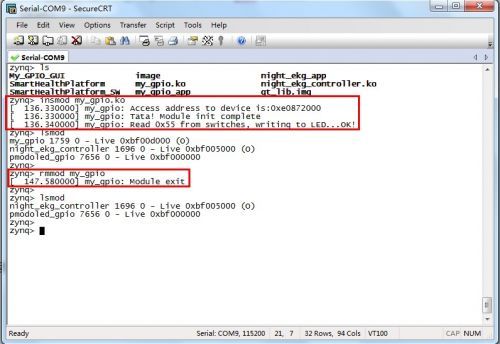
printk("my_gpio: Access address to device is:0x%x", (unsigned int)GPIO_Regs);
GPIO_Regs指针指向映射后的空间,通过ioremap函数,为I/O地址为MY_GPIO_PHY_ADDR的设备分配了MY_GPIO_REG_NUM大小的空间。映射后的虚拟地址将通过内核打印出来。
当有了可以直接操作的地址后,通过iowrite32和ioread32就可以简单便捷地实现写入和读取数据的操作。
int val;
val = ioread32(GPIO_Regs);
printk("my_gpio: Read 0x%x from switches, writing to LED...", val);
iowrite32(val, GPIO_Regs+4);
printk("OK!");
执行上述代码,GPIO_Regs开头地址处的32位数据——自定义外设寄存器0,也就是Switch状态——会被读取,并写入到偏移4字节(32位)之后的地址中,即自定义外设的寄存器1,控制LED的状态。将这段代码加入到上面提到的init函数中,当驱动模块加载后,8个开关的电平状态会被读取,并在LED的8个管脚上输出,使LED亮灭与Switch开关保持一致。
这就是通过对静态I/O地址(MY_GPIO_PHY_ADDR就是我们在前几篇中设置的my_gpio外设地址0x75c80000)映射的方式,让Linux系统有能力访问设备。那么Device Tree又是做什么用的呢,我曾就这个问题在网上询问一位国外的工程师,现将他的回答摘录如下:
The standard way is to add an entry for your peripheral in Linux’ device tree, and have the driver fetch the physical address from there. But for a on-off project, hardcoding the physical address of the peripheral in the driver is fairly acceptable.
事实上,在MicroBlaze中,就可以通过of_platform实现读取DeviceTree的compatible信息,来匹配设备和驱动:
static struct of_device_id my_gpio_of_match[] __devinitdata = {
{ .compatible = "xlnx, my_gpio-1.00.a", },
{}
};
只是兔子还没在Zynq平台上成功实现过,而项目的时间又那么紧,于是就采取了“acceptable”的方法了,哈哈。有兴趣的童鞋可以继续深究。
当然,只实现对设备的访问还是不够的,这样的驱动,只有在加载或卸载时会执行一些操作,而无法被Linux下的应用程序访问。因此,我们还要完成一个对上层的接口,这需要利用Linux的文件系统。下面的两个结构体正是实现了这样的功能:
static const struct file_operations my_gpio_fops =
{
.owner = THIS_MODULE,
.open = my_gpio_open,
.release = my_gpio_release,
.read = my_gpio_read,
.unlocked_ioctl = my_gpio_ioctl,
};
static struct miscdevice my_gpio_dev =
{
.minor = MISC_DYNAMIC_MINOR,
.name = DEVICE_NAME,
.fops = &my_gpio_fops,
};
兔子在这里定义了一个MISC型的设备,并为之建立了open、release、read和ioctl的方法,open和release是打开和释放设备的操作,这里并无实际功能。
static int my_gpio_open(struct inode * inode , struct file * filp)
{
return 0;
}
static int my_gpio_release(struct inode * inode, struct file *filp)
{
return 0;
}
ioctl就是写寄存器操作的封装函数了,使用的方法依旧是iowrite32,其中reg_num代表寄存器编号,arg是要写入的32位值。
static int my_gpio_ioctl(struct file *filp, unsigned int reg_num, unsigned long arg)
{
if(reg_num>=0 && reg_num
{
iowrite32(arg, GPIO_Regs+reg_num*4);
printk("my_gpio: Write 0x%x to 0x%x!", arg, GPIO_Regs+reg_num*4);
}
else
{
printk("my_gpio:[ERROR] Wrong register number!");
return -EINVAL;
}
return 0;
}
read方法则可以将读取到的数据传递给上层,由于其返回值为char型,因此要分几次读取(当然使用ioread32再拆分也可以啦)。
static int my_gpio_read(struct file *filp, char *buffer, size_t length, loff_t * offset)
{
int bytes_read = 0;
int i=0;
if (filp->f_flags & O_NONBLOCK)
return -EAGAIN;
if (length>0 && length<=(MY_GPIO_REG_NUM*4))
{
for(i=0;i
{
*(buffer+i)=(char)ioread8(GPIO_Regs+i);
}
bytes_read=i;
}
return bytes_read;
}
再使用misc_register函数对设备进行注册:
int ret;
ret = misc_register(&my_gpio_dev);
设备注册后,会在dev目录下生成一个以DEVICE_NAME值命名的文件(兔子这里是“my_gpio_dev”)。操作这个文件,就相当于操作我们的设备了,具体使用的也就是文件操作的open、close、read等函数。驱动写完后,还需要进行编译,兔子写了一个简单的Makefile文件,用于生成可被系统加载的.ko文件,在源文件和Makefile的目录下输入 make 指令即可。KERN_SRC指的则是linux内核的路径。Makefile内容如下:
# Cross compiler makefile for my_gpio
# By Nightmare @ EEFOCUS 2012-10-10
KERN_SRC=/arm/zed/linux-3.3-digilent
obj-m := my_gpio.o
all:
make -C $(KERN_SRC) ARCH=arm M=`pwd` modules
clean:
make -C $(KERN_SRC) ARCH=arm M=`pwd=` clean
下面是完整的驱动代码、Makefile文件和生成的.ko模块文件:
My_GPIO_Driver (已重传)
将编译好的驱动文件通过U盘加载到ZedBoard中:
mount /dev/sda2 /mnt
insmod /mnt/my_gpio.ko
卸载驱动的指令为rmmod:
rmmod my_gpio
加载设备时,LED会根据Switch的状态来实现亮灭。怎么样,Linux下的自定义外设驱动其实挺简单吧。上效果图:
 |
|


 发表于 2013-12-30 22:03:33
发表于 2013-12-30 22:03:33
 /4
/4 
