
随着无人机行业的发展,以及各大开源飞控平台的推动,使得行业草创初期,行业大佬前辈们需要踏实苦干、执着坚守、花大气力研发出来的飞控算法与功能,今天的我们可以基本不费力的通过自己学习相关算法编程去实现。十年前,国内无人机从市场规模和从业人数上来看,压根算不上一个行业。国内早期的飞控研发者,大多是来源于电子、控制、计算机、航天相关专业优秀人才,他们对飞行有着与生俱来的爱好与执着,对技术追求极致,他们作为行业的拓疆者,从最早起的航模论坛给发烧友出售飞控的盈利探索时代(如极飞、大疆),到现在消费级无人机和工业级无人机遍地开花的局面。独立拥有成熟飞控技术的企业越来越多,当前工业级无人机已摆脱了消费级无人机的影子,开始出现产业逐渐明晰、需求不断涌现,技术标准逐渐成型、市场不断细分的形势。无人机厂商已经不仅仅关注于无人机本身,而是提出了针对多个行业的整体化解决方案。无人机行业处于成长期,未来发展前景广阔。
全国大学生电子设计竞赛是教育部和工业和信息化部共同发起的大学生学科竞赛之一,是面向大学生的群众性科技活动,属于A类赛事,含金量很高,高校普遍对本竞赛比较重视,同时赛题可选性很大,使得各个层次高校学生都有机会参与进来,竞赛控制类题目从2013年起,开始四旋翼飞行器相关试题。实现的任务从早起的一键自动起飞、位置悬停、寻迹、投放物块、追踪移动小车、穿越障碍、模拟灭火等。视觉部分传感器处理从最开始的线性CCD TSL1401到现在的必须光流、数字**/OPENMV全上等。这无疑是对参赛选手的能力极大挑战,学生需要很长时间准备,前期花大量精力学习和积累飞控相关知识以及视觉知识,能高效熟练解决无人机在参赛过程中的各类问题。
经过多方调研,当前大学生电赛飞行器中存在如下问题:
•未来十年国赛赞助单位均有TI,参赛的飞行器主控必须使用TI的单片机,需要处理传感器采集、数据滤波、姿态解算、惯性导航、控制算法等所有内容,之前STM32+TI、STM32+APM/PX4模拟遥控器信号的伪操作方式行不通了。无疑加重了学生的参赛工作量,使得能力一般的学生稳稳的拿省二、省三的机会都没有了。
•指导老师不懂飞行器相关原理、技术要点,无实际指导效能;
•制作飞行器开销巨大,经费不充足的单位,需要学生自己先行垫付,开始很肉疼,最后直接烧钱到麻木,要么弃赛,要么变无人机真爱粉,最终修炼大神
•学生自学,学长帮带的形式在有些时候行不通,能力一般的师兄毕业不从事无人机相关工作,技术指导有限,有能力的师兄毕业去了DJI,签了保密协议,无法指导;
•任何游戏都怕人民币玩家单位,经费充足的RMB玩家直接私下下找相关公司定制带Logo的整机参赛,相关公司公开宣传对应方案,售价动不动就2~3万,这些公司所为有违竞赛公平,极大的激发了民怨,拥有飞行爱好梦想的学生,看到这样的飞机出现在比赛现场击败自己时,只能默默抹眼泪。
•市面上目前没有一款基于TI主控的低成本开源飞控给大家学习,相关技术团队与公司不愿意出低成本学习方案,因为微薄的利润支撑不了情怀与工作量,养活不了一个技术公司,所以作为现实需求,只能是像早期消费机那样挣取暴利快速致富实现转型。
•国内开源飞控鱼龙混杂、问题颇多,但是相比三年前一抹黑学习飞控的时候,现在所处的情形,要好太多太多,大家对国内开源飞控多一些包容和理解,多提宝贵意见,拍砖打脸没有关系,虚心接受各方批评指正,促进圈子、产品健全与完善,我们会努力承担更多的责任和担当。
•设计CarryPilot与GankerPilot初衷是充分考虑当下国内高校飞控类竞赛学习现状,经过了多方调研考察,我们合理把握开源尺度,秉承道义,经过半年的研发,推出了目前两款基于TI平台的飞控,飞控算法部分会提供讲解视频,功能模块具体实现讲解,独家飞控调参视频,视觉方向教程,提供全程售后技术支持,无名创新旨在打造一款公平的、靠谱的、高效学习的竞赛飞控学习平台。
•飞控支持对家地面站,山外多功能调试助手,匿名地面站,其中飞控的遥控器校准、电调形成校准、磁力计椭球校准、加速度6面校准、水平校准等可直接通过操作遥控器实现,极大的方便客户使用,飞控代码采用Keil开发,方便国内编程初学者的使用。
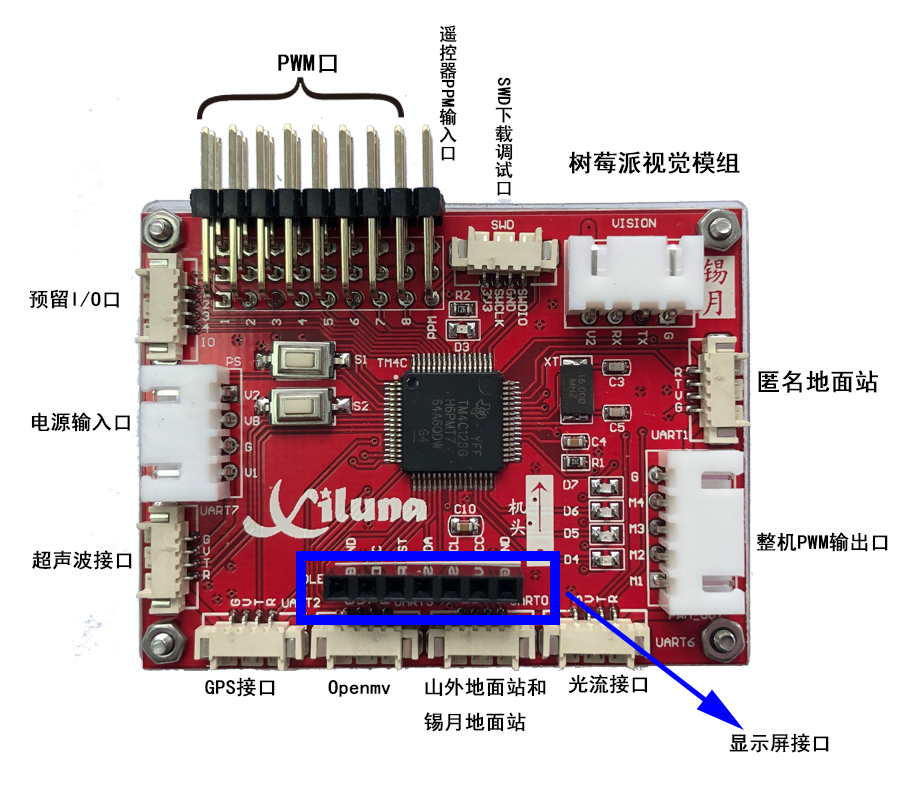
•主控平台TM4C123GH6PM,飞控预设8路PWM口、6路通讯串口、两路I2C口、4个预留IO口、4个可编程状态指示灯、2个板载按键、1个OLED显示屏 SPI/I2C、1个外部电压检测口、1个SWD下载调试口、飞控功能和慧飞者基本一致:
•一键起飞
•一键着陆/GPS返航降落
•GPS定点/定速巡航
•光流定点悬停/刹车
•SDK开发者模式(直接通过串口数据帧控制,也可以事先设定轨迹)
•OPENMV循迹、追踪移动物体。
•.........
| 

 发表于 2019-2-18 15:08:18
发表于 2019-2-18 15:08:18
 /2
/2 

